I’m getting ‘No Power Connected!’ from the uArm when I turn it on, and after doing M2500, nothing happens.
I added a line to change the LED back to green when the ‘ok’ is received and it doesn’t change.

When I comment out the response code and use VIN power, UART from the OpenMV seems to be resetting the whole uArm.
If I use USB to talk to OpenMV serial port it just says None a bunch of times
Suddenly, mine is working after sending ok now, and the 'No power connected" went away. I think the flash memory on the OpenMV is to blame. A similar thing used to happen with the esp8266 in arduino and nodemcu.
Files would randomly corrupt and old code would get pushed back into the bootloader, making random resets and old code merging with the new like fucking westworld.
Hi @Tophness, no power connected means the adapter is not connected well. Please pay attention to it.
Since the power consumption of openmv is a little high, so if we connect it to the running robot, the robot will reset because of the voltage fluctuation.
You mean it’s bad to connect OpenMV via USB while it’s already being powered by the Uarm VIN? That’s the way it is with most arduinos. It’s probably a good idea to unplug the 5V to the uArm printerface if you’re already using USB?
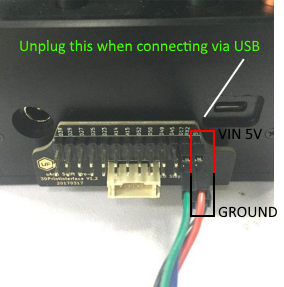
It’s not harmful but it will reset all your settings of uArm. So it’s just inconvenient. Disconnect the VIN and power it by USB cable is a good idea as well.
In August already, I have submitted a pull request to the tracking repository that improves the code and adds some new functionality. Would someone mind and merge it, or reject it, hopefully providing a reason? Thanks.
Could you please send the link for the guide?
How about this one.