Calibration corrected the conical XY plane issue. Thank you.
I added an extra “M2401 C” step at point C, before doing the “M2401 B” at point B. I don’t know if that did anything other than making me feel better.
Hey @tony,
after calibration the issue is not entirely gone. When drawing, I can now get the shape drawn with a soft felt pen. But the pen still has too much pressure at C and too little at A. The shape is thus still slightly distorted, closer to C and the lines become noticeable thinner or have missing bits, around A.
If I use a ballpen, the arm will have to do a lot of work because of the high pressure at point C. Basically, the XY plane is still tilted; this time downwards away from the arm.
I did the calibration for point B only and then again, for points A, B & C. I have two uArm Swift Pros. The behaviour is exactly the same. As I get away from B, the pen is pushed down too much.
So this must be something wrong in general. If it was specific to one of my arms, I would only see the XY plane issue with one after calibration. But it is exactly the same with both arms.
.mm
Hey @virtualritz, you could use the blockly Moveto function to test how big the difference is the Z in point A B C. Usually, it should be around 0.5mm after the calibration. So could you please do a test like that to see if the calibration works fine for you? Thanks
I didn’t test but I would be it will be 0.5 more or less because that’s what I am seeing.
0.5 is too much to do any drawings with a hard pencil or fountain pencil and will also create issues with focussing of the laser.
Detailed laser work will not be possible unless the arm is close to point B.
Is this going to be improved to be much less than this, e.g. less than 0.1mm, in a future update?
.mm
We are designing a new pen holder with spring in it which would solve the drawing issue with hard pencil. And it’s possible to make the 0.5 much smaller in the future, as well. Thanks
It was discussed in the FB group that there would be calibration coming also to A and C points. If that is correct then I assume that may fix the issue. Any news on that @tony?
Have the same issue. The difference between C (-48.7) and A (-50.3) is almost 2mm after the calibration. That makes drawing impossible even with soft pen.
Minor issue is arm also slightly inclined to the right if you compare intersections of the B radius with the calibration list border: right intersection has (-49.24), left has (-49.79).
I think you should try the calibration guide which would improve the accuracy.
https://drive.google.com/open?id=0B-L-tCvknXU9ZXBweVlYRXd5VHM
Hi Hjelt, sorry for the late reply, since we are dealing with some different issues from our customers, so the process is a little bit slow for each. We will keep you informed about it. Thanks
1 Like
Hi @tony, that is actually after the calibration. The situation before was slightly worse (2.5mm diff).
That’s weird, did you upload the 3.1.16 first? And did you plug in the power before calibration? Show me some picture about your steps might be helpful. Thanks
Hey @tony, this is not weird. It should be a known problem to you guys by now.
I’m seeing exactly the same issue @serdan is describing, with 3.1.16, after calibration, with both of my uArms!
The xy plane is still not well enough aligned.
It makes uArm swift Pro useless for something as simple as drawing and even more so for engraving (laser goes out of focus) or 3D printing (unless you use a tiny working volume in xy).
Please fix this.
.mm
Rather than the current 1-point ‘B’ calibration, I’d like to see a 9-point calibration so that the xy-plane can be properly flattened. My arm leans a bit to the right, so I put 2 or three sheets of paper under the right side. With a 9-point calibration we could fix the z as a function of R problem, and also correct for tilt.
You mentioned the focus, does it mean height changed several millmeters during the engraving? Since before release, we tested it in our assembly line and it works well. Would you please share me your details about the calibration steps? That would help us to find the issue, thanks
@serdan @virtualritz @hoodel Thanks for everyone’s feedback, our engineer are working on the multi points calibration right now, they have just finished working on the Grove modules. I am sure this function will be added later on.
BTW, I also find out a potential cause of the horizontal error, please check the parts between lower arm and upper arm like the picture below.
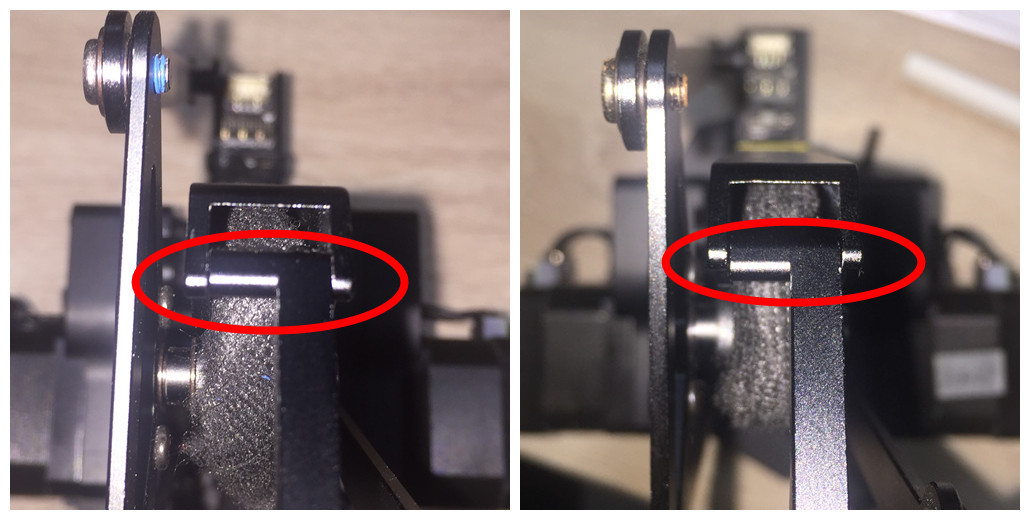
The parts in red circle was bended a bit, although it is very rare but it might cause the horizontal error. The damage was caused during the delivery, and please make sure your robot is fine.
Thanks
If there is a bend in the part at the elbow, as you describe, it is too slight for me to see it. Another possibility for a bent part might be at the wrist (blury, up and to the left in the photo). I can’t tell from looking at that one either. All of the screws seem to be tight.
Thanks. Will be waiting for the new procedure.
You can always contact me to test it on problematic arm before the release.
Don’t think the elbow is bended on my arm. Looks solid, straight, and properly assembled.
Maybe you can let me have a try, thanks for your help in advance ![]() And I am glad to see the part you mention at the wrist, thanks a lot
And I am glad to see the part you mention at the wrist, thanks a lot