I plan to simulate the uArm in ROS gazebo without connecting real uArm.
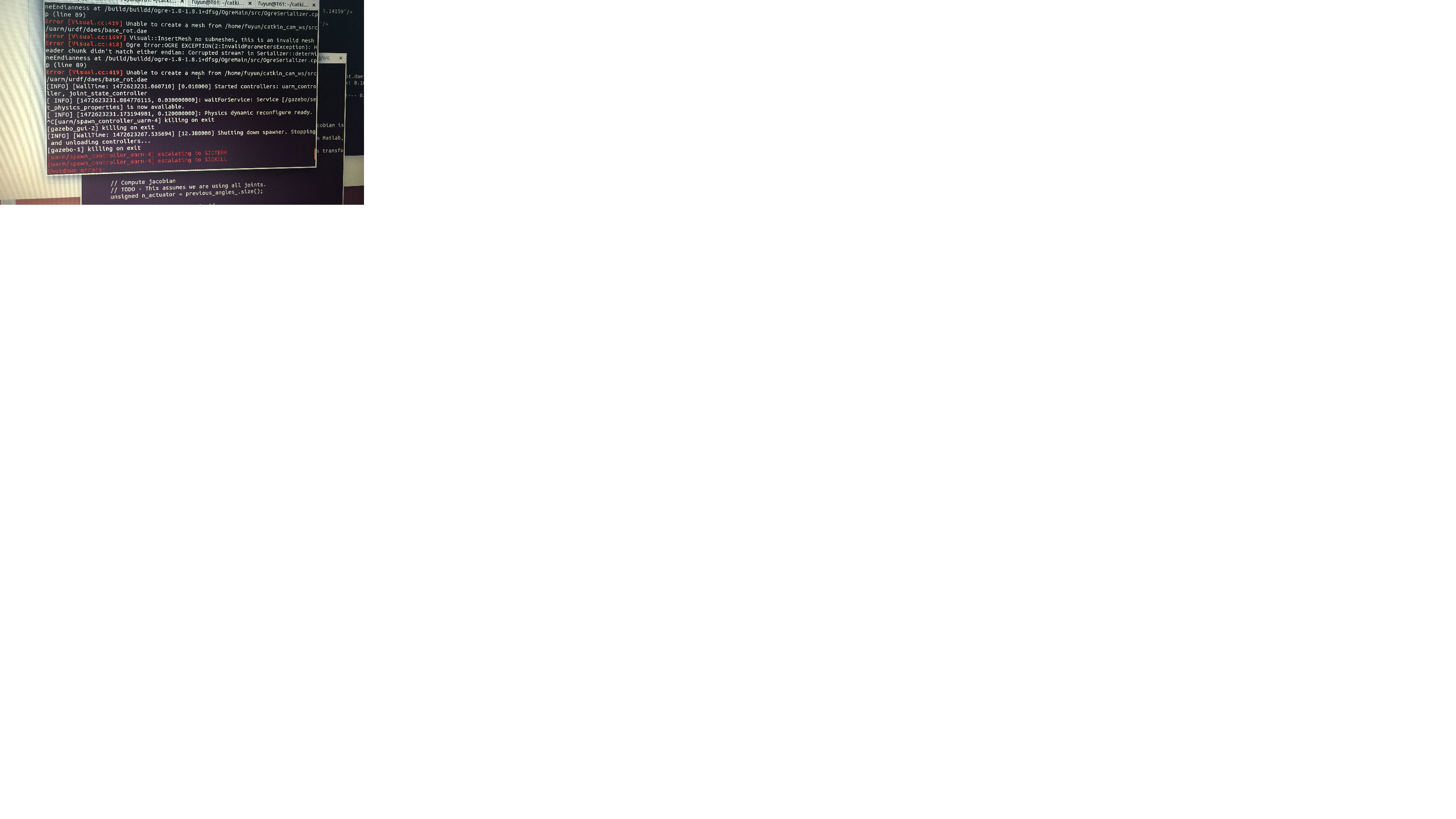
First, I tried to setup the xacro(urdf) file for gazebo. I run into a problem to add mesh from /urdf/daes/base_rot.dae
Would anybody let me know who verify the uArm in gazebo?