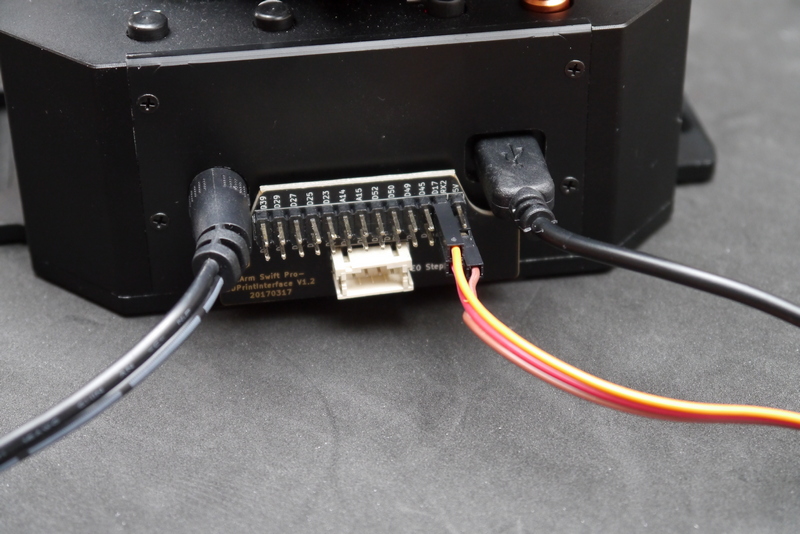
Hi, with the uArm Swift Pro firmware 4.2 or higher it is now possible to use an Arduino or ESP 32 for the control without any problems.
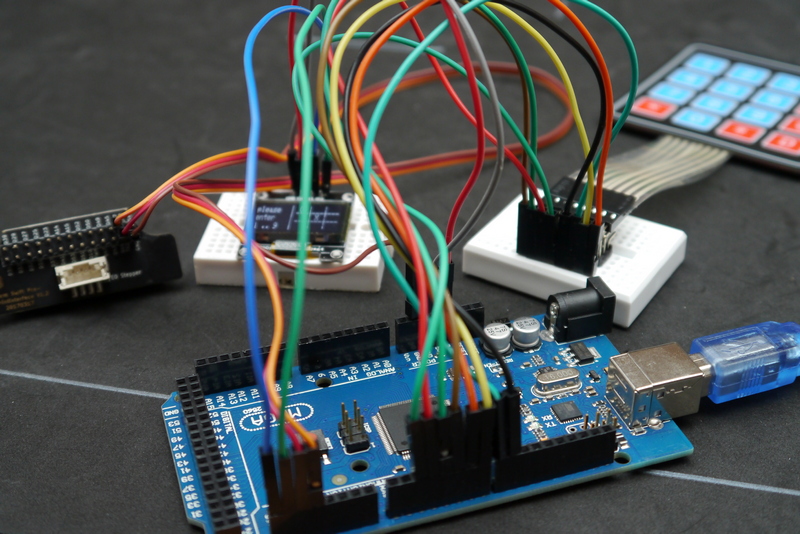
The Arduino Mega 2560 is particularly suitable. It has 54 digital I/O pins, 16 analog inputs and 4 UARTs. It can also be used to manage large, extensive robotics projects. And all this at a very reasonable price.
Today I would like to present my Tic Tac Toe project for the Arduino.
The robot arm is controlled by the Arduino Mega 2560 and the input by the player ("X or “O” ") via a membrane keyboard.
I have used an existing GitHub Tic-Tac-Toe sketch (ArduinoTicTacToe/TicTacToe.ino at master · klauscam/ArduinoTicTacToe · GitHub) that uses the MinMax algorithm to determine what movement the computer should perform after each movement of the player.
I’ve added to this program the code to control the uArm position for player and computer, a membrane keyboard, and an Oled display.
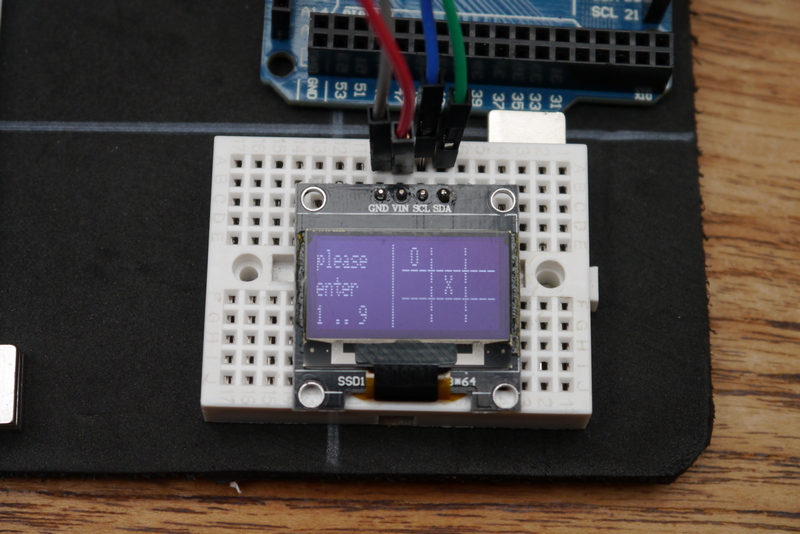
The player controls his input via the membrane keyboard, the computer via the Minimax algorithm. The display shows the respective game states. At the start of the game you can choose whether the computer or the player starts.
I hope you like it and I could give you an inspiration.
Best regards from cologne/germany
Klaus
My code can be found under: https://github.com/KlausKoeln/uArm-swift-pro
Watch the video here: https://www.youtube.com/watch?v=EtbgTBNQQTA&feature=youtu.be