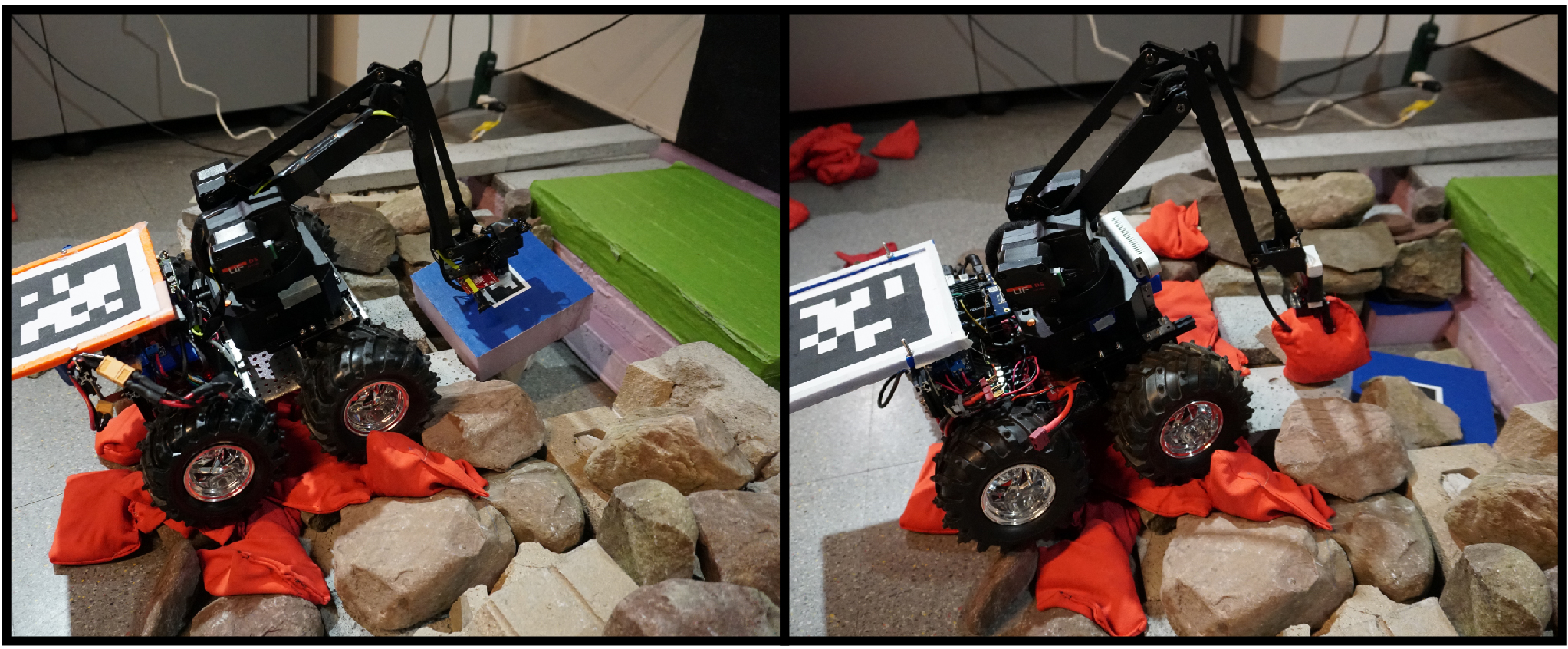
Hi, I’m happy to share my project using uArm with this community. My colleagues and I have built two mobile manipulators using uArm Swift Pro, and we use them to autonomously built navigable structures. The videos showcasing our experiments are available in video 1 (one robot) and video 2 (two robots), for more details you can check our paper.
Maira Saboia
University at Buffalo