Hello,
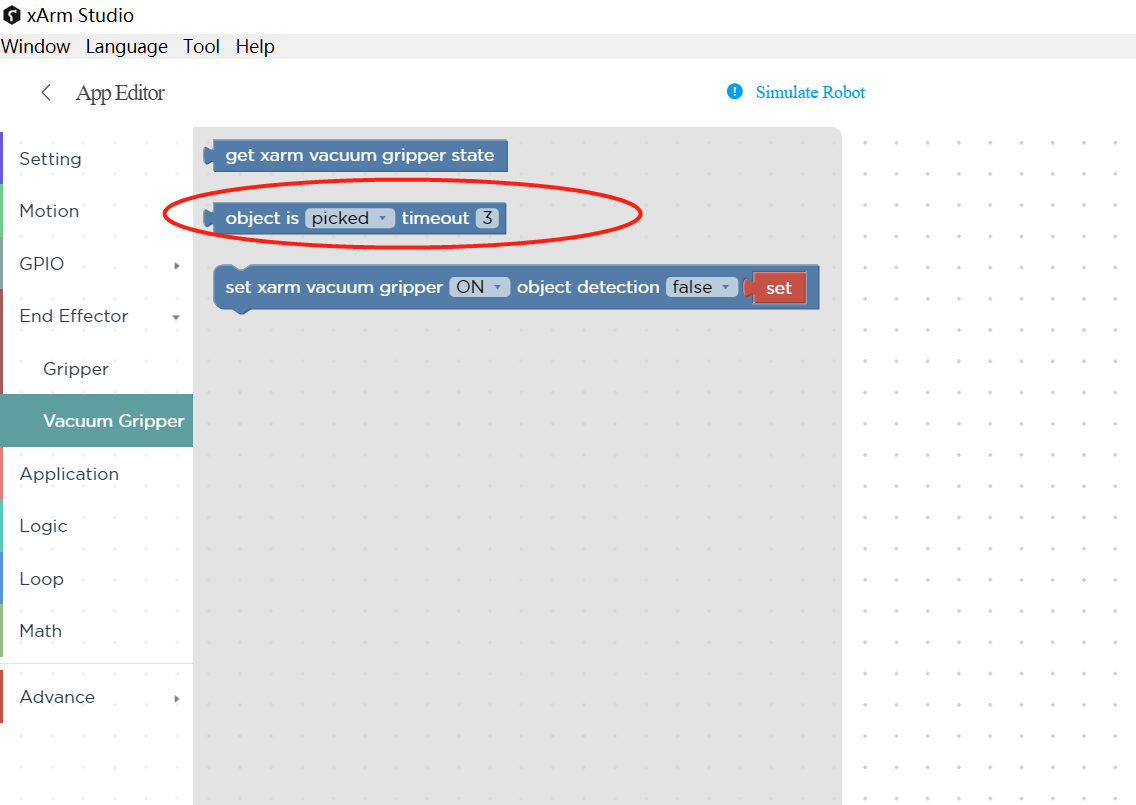
Is there a function which returns a boolean value or some sort of callback to let the user know if the suction cup is holding a load or if it failed to suck something up?
Hello,
Is there a function which returns a boolean value or some sort of callback to let the user know if the suction cup is holding a load or if it failed to suck something up?
Yes! In the Python SDK how is this done?
Hi,you can refer to the example below:
import sys
import time
import datetime
import threading
from xarm import version
from xarm.wrapper import XArmAPI
print(‘xArm-Python-SDK Version:{}’.format(version.version))
arm = XArmAPI(‘192.168.1.135’)
arm.clean_warn()
arm.clean_error()
arm.motion_enable(True)
arm.set_mode(0)
arm.set_state(0)
time.sleep(1)
arm.set_position(*[425.9, 0.0, 678.8, 180.0, 0.0, 0.0], speed=200, mvacc=20000, radius=-1.0, wait=True)
arm.set_position(*[430.4, 0.0, 389.7, 180.0, -1.2, 0.1], speed=200, mvacc=20000, radius=-1.0,wait=True)
arm.set_suction_cup(True, False)
for i in range(int(6)):
if arm.get_suction_cup()[1] == 1:
break
time.sleep(0.5)
if arm.get_suction_cup()[1] == 1:
arm.set_servo_angle(angle=[97.8, -23.9, -93.9, 0.0, 116.1, 0.0],speed=20, mvacc=500,wait=True)
arm.set_position(*[-36.9, 344.5, 471.8, 180.0, -1.7, 97.8], speed=200,mvacc=20000, radius=-1.0, wait=True)
arm.set_suction_cup(False, False)
arm.set_position(*[425.9, 0.0, 678.8, 180.0, 0.0, 0.0], speed=200,mvacc=20000, radius=-1.0, wait=True)
else:
arm.set_servo_angle(angle=[-81.9, -23.9, -93.9, 0.0, 116.1, 0.0],speed=20, mvacc=500, wait=True)