Firmware Version: 3.2.0
Operation System: Win7
uArm Controlling Method: Python
Hi,
this is my first try to move the arm via Python. This is my code and it’s outcome
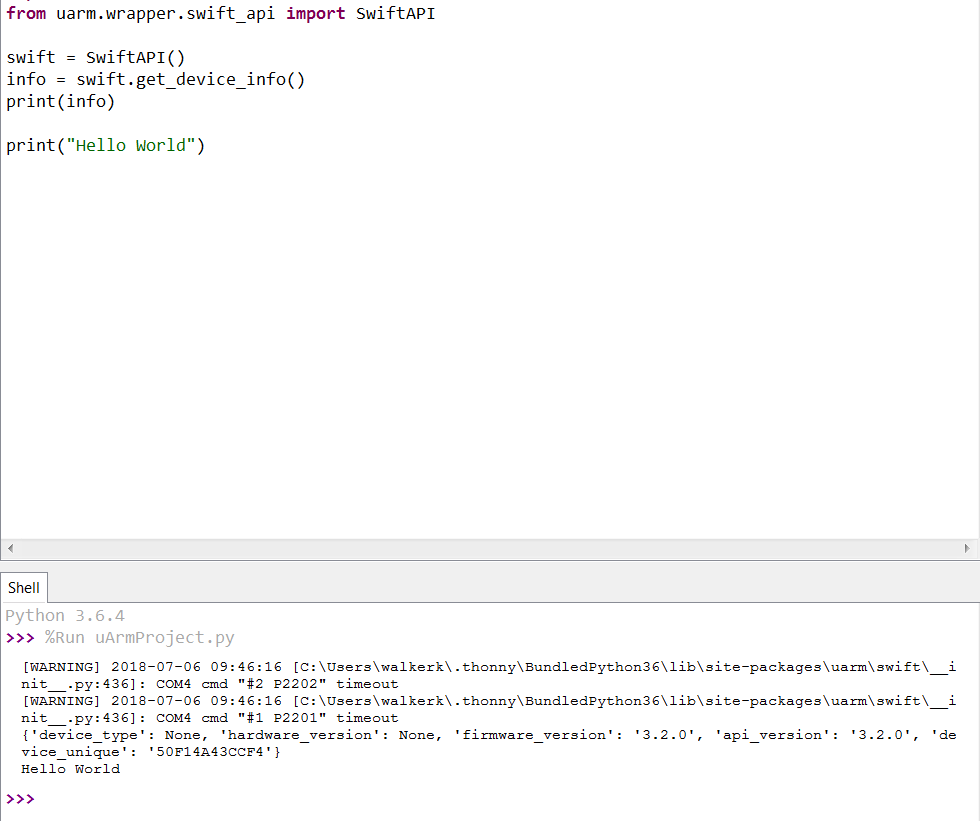
I don’t know why i get this timeout. When I call this function via Arduino serial monitor it works fine.
Can someone help me?
Regards,
Kathrin