Hi, is there any way to send feedforward torques or velocity targets when sending a trajectory via the trajectory upload on the webapp? I am currently listing a sequence of positions in a .traj file and uploading that. If not, are there any listed values for the gains used by the internal controller to track the given trajectory?
If I’m able to specify a desired velocity and a feedforward torque I would be better able to control the arm, let me know if there is anyway for this capability. Thanks!
Thanks for the info Krishna, now we understand the issue.
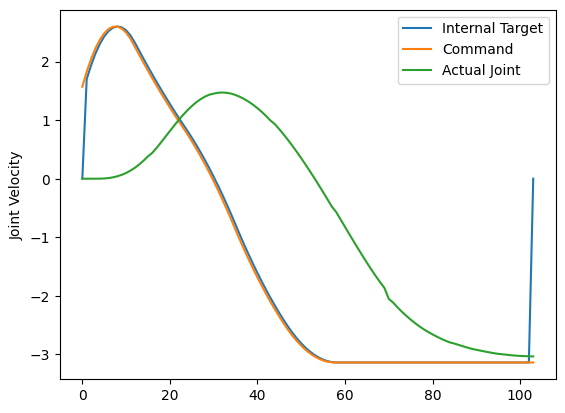
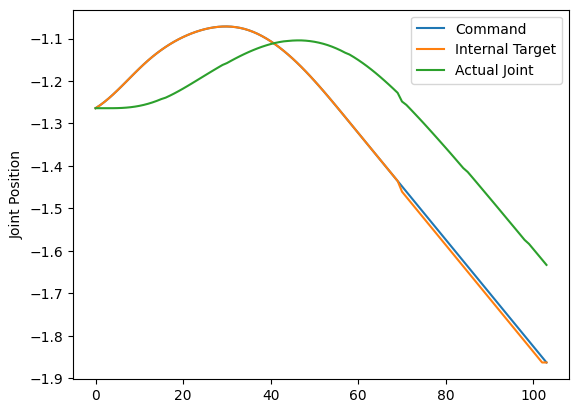
We are trying to modify the PID to reduce the servo motor delay, will let you know the result soon.
Hi Krishna,
We are testing the new PID which reduced the servo motor delay
Please copy this post link and send to my Email daniel.wang@ufactory.cc
I will share you the new PID and method of writing PID by Email next week.