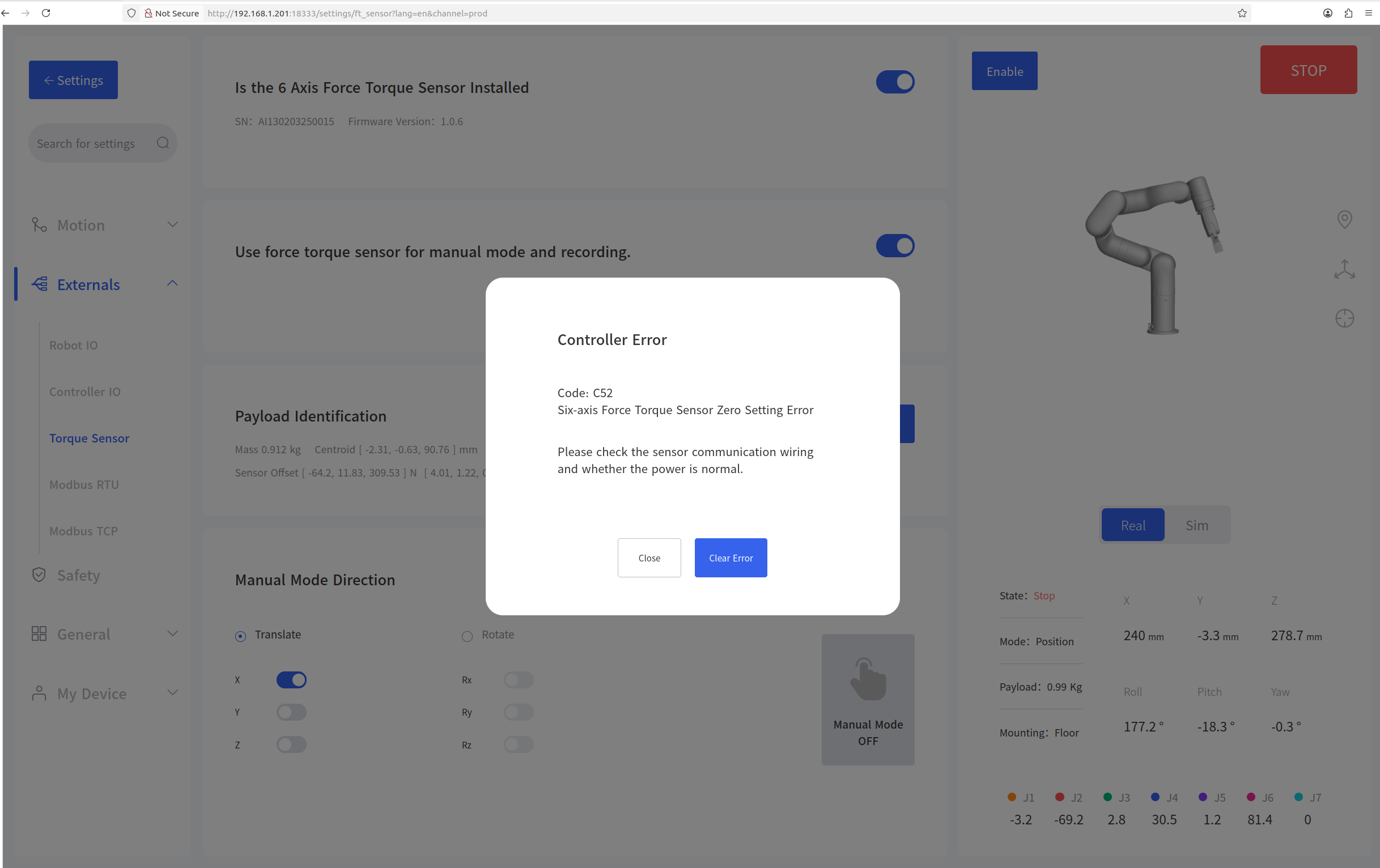
We were using impedance control (in servo control mode) to open a fridge using our Xarm7 (XS130510D43A14) with the Ufactory 6axis Force Torque sensor (Al130203250015); After a FT sensor overload, we are now unable to use the robot in impedance control mode and are getting the error:
Hi Ajit,
Please make remove everything attached to the flange of the FT sensor, then move the robot to Zero position(all joints angles set to zero).
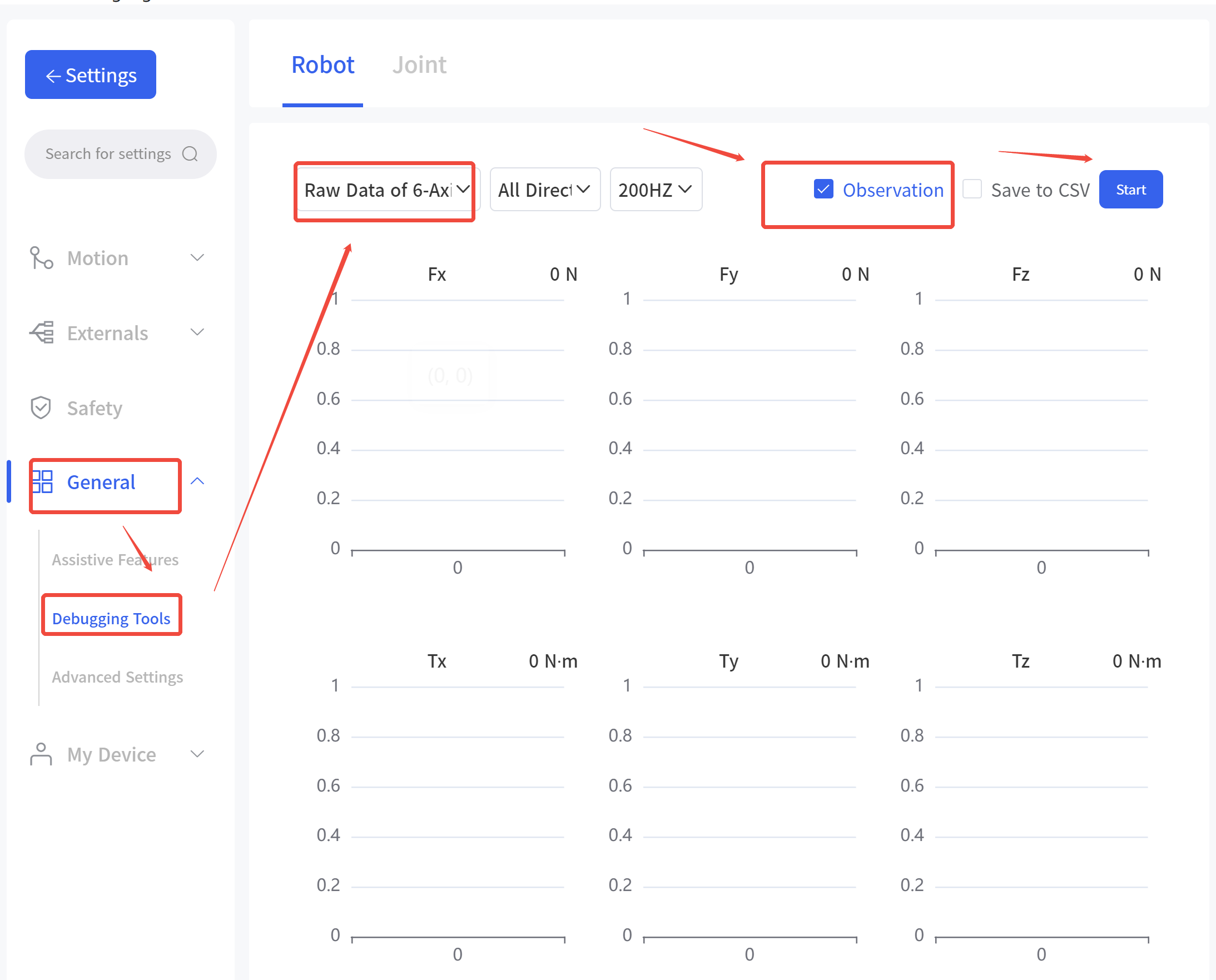
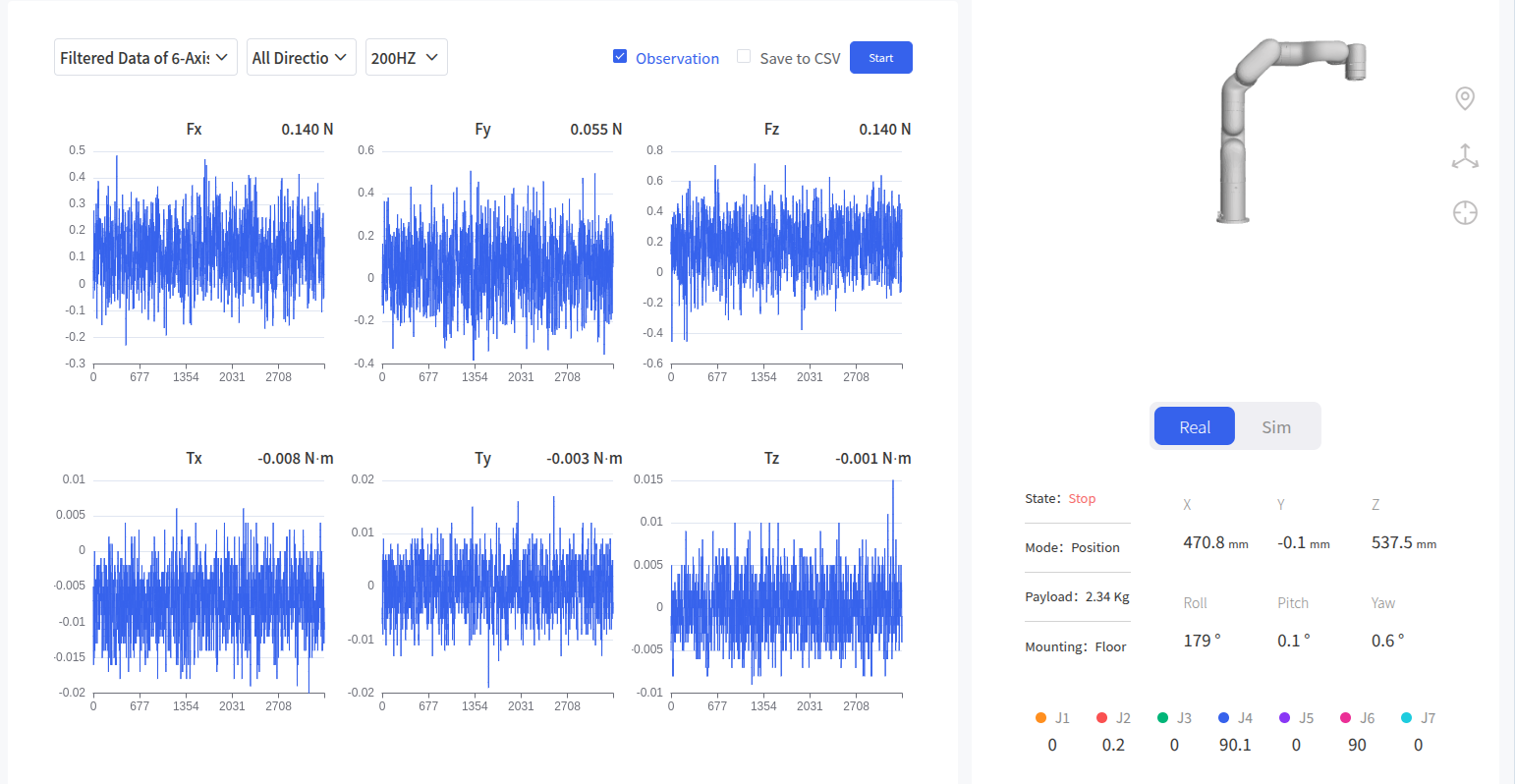
Then go to the “Settings-General-Debugging Tools”, choose the Raw Data of FT sensor and check for the data about 5 seconds, and post the screenshot here.
Thanks
Hi Ajit,
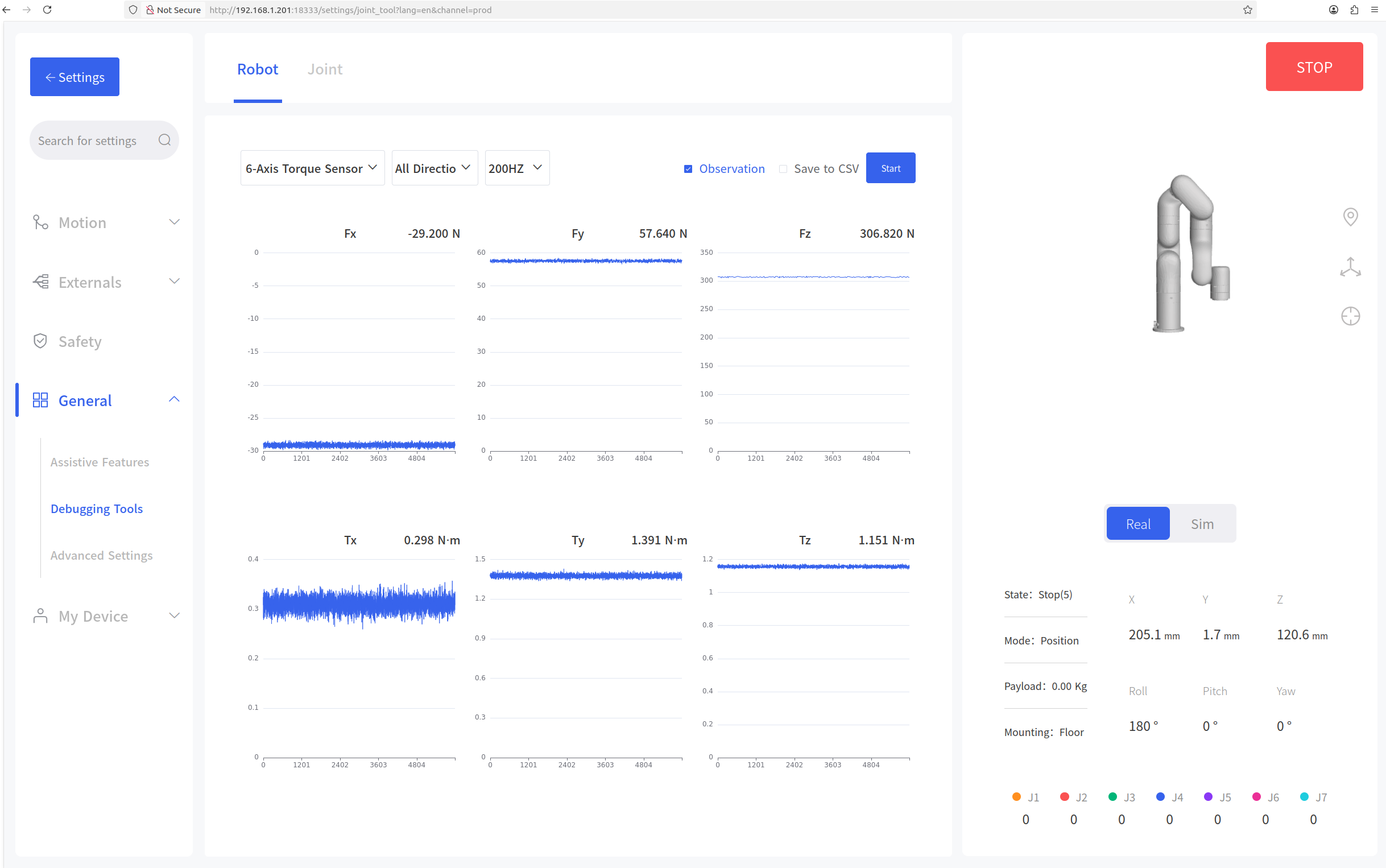
You are right, the QA standard of that FT sensor is ±60 N for Fx/Fy/Fz and ±2 N·m for Tx/Ty/Tz.
We recommend to send the FT sensor for repair.
Please copy this post link along with the SN of the FT sensor and your shipping information to support@ufactory.cc, my colleague with help with the RMA service.
We would like to know what caused this error, and why the sensor seems a little less robust. The sensor did not have any collisions; The only thing that happened was the sensor overloading sometime while trying to open a dishwasher / refrigerator door, after which it usually worked fine once we clear the error.
Below is what we were trying to do: https://imgur.com/a/Kl06hbx
**Note that in the fridge video shown here, I press the emergency stop button because the robot started to shake vigorously.
We started to get this error after testing on the fridge a few times.
Please let us know if our usage is outside the intended use case of the robot. And it’d be great if there’s a way to just reset/clear this error and continue using the sensor as normal (even if the raw values are slightly off)
Hi Ajit,
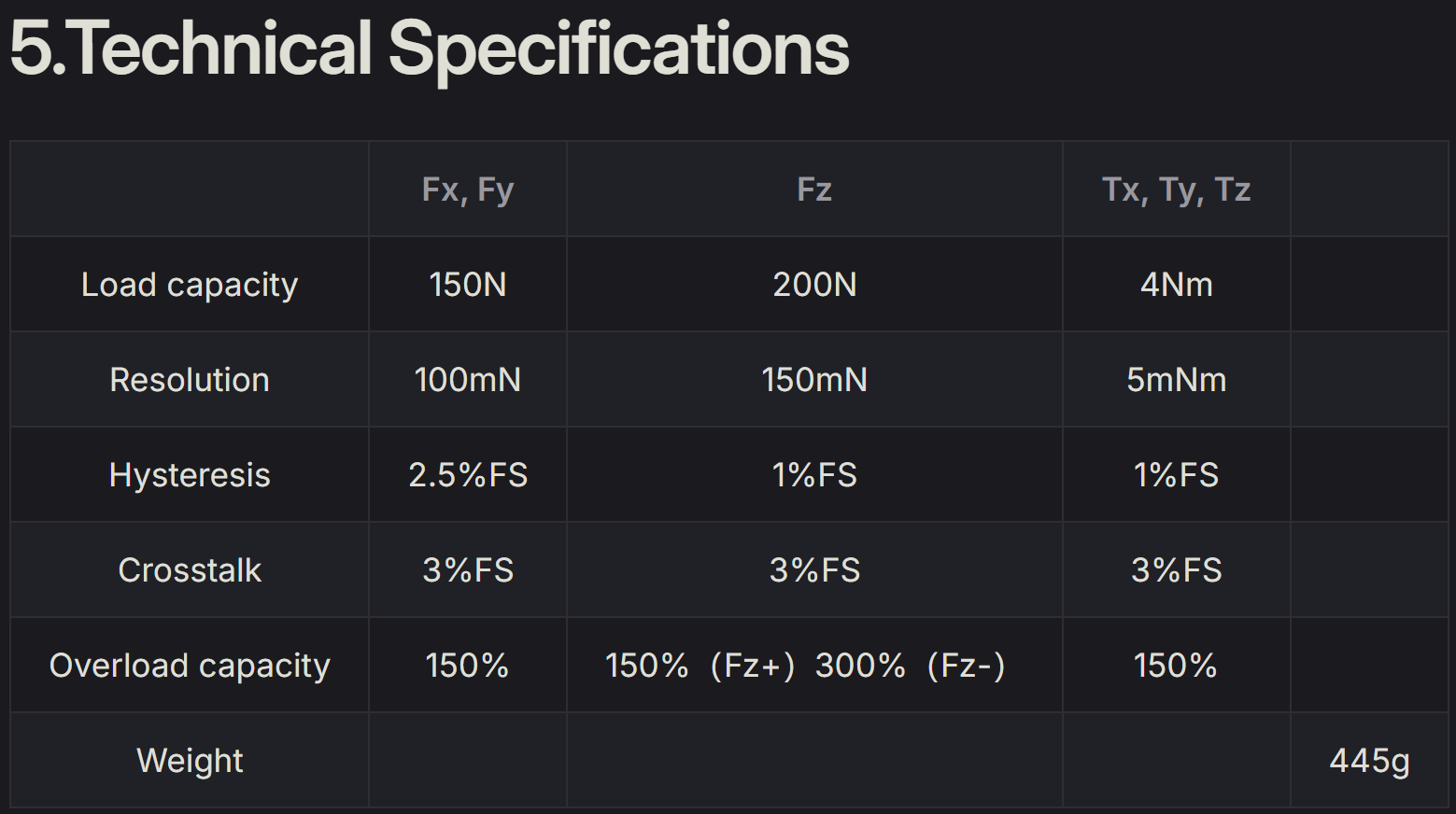
The overload range of the FT sensor is relatively small, especially in the Tx/Ty/Tz directions. Once overloaded, it may cause irreversible damage to the torque sensor. In your application, after installing the gripper, the moment arm in the Tx/Ty/Tz directions becomes longer, making the data in these three directions more prone to overload.
Is the FT sensor definitely necessary in your application?
I am having the same issue with the error code C52, i am mainly using ROS2, where it it is not displaying any errors, although the problem is occurring exactly when i try to set the sensor application to impedance or force control. All readings are normal, with and without the EE we have mounted. The robot arm is Xarm7 and i am running the latest update. So the sensor is working, it is just the impedance/Admittance control that is not working
Hi,
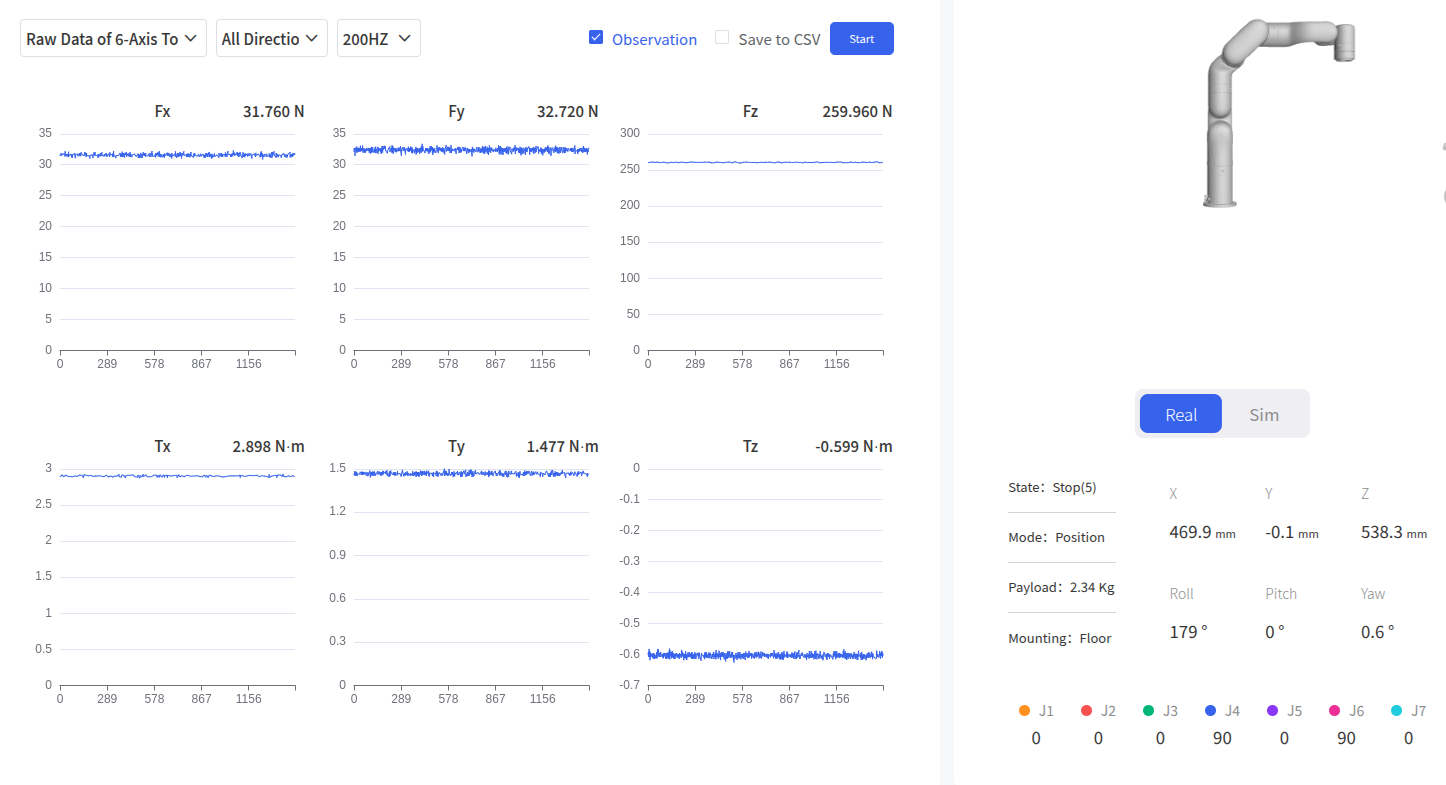
We need check the raw data of the FT sensor, please choose the “Raw Data of 6-Axis -Torque Sensor” and then check the data and post the screen shoot here
Hi,
Thanks for the data. The QA standard of current version of FT sensor is, raw data when nothing attached to FT sensor, ±60 N for Fx/Fy/Fz and ±2 N·m for Tx/Ty/Tz.
We recommend to send the FT sensor for repair.
Please copy this post link along with the SN of the FT sensor and your shipping information to support@ufactory.cc, my colleague with help with the RMA service.