When I calibrate uArm,D13 servo have no any action,D12 servo is right.
After uploaded the Remotecontrol sketch to Arduino,I heared three beeps,then press button D7 for 3 seconds,after two beeps,pull uArm to their furtherest extent,next push once button D7,D12 servo drive the suction approach to base,but D13 servo have no any action. Singly test D13 servo is OK.I checked the power and wire are right.Could you please give me any help or guidance?
Hello, Could I know which version of uArm on your hand? Metal or acrylic version?
acrylic version.Thanks!
Hi, if the robot arm can’t finish the calibration like you said, you’d better check the step34 in the instructions. And make sure the moving range is correct.
Yes.I checked the servo moving range is correct. But If I upload the Metal-RemoteContrl to Arduino,uArm can do calibration action,although at finished uArm can’t go back to its Zero position. How should I check the Zero position?
By the way,I can’t successfully verify the uArmcalibration.ino on V1.0.5 Arduino IDE.Many errors come out.
In file included from D:\arduino-1.0.5-r2\libraries\UF_uArm/UF_uArm.h:20,
from uArmCalibration.ino:13:
D:\arduino-1.0.5-r2\libraries\UF_uArm/VarSpeedServo.h:112: error: conflicting declaration ‘_timer1’
D:\arduino-1.0.5-r2\libraries\Servo/Servo.h:83: error: ‘_timer1’ has a previous declaration as ‘timer16_Sequence_t _timer1’
D:\arduino-1.0.5-r2\libraries\UF_uArm/VarSpeedServo.h:112: error: conflicting declaration ‘_Nbr_16timers’
D:\arduino-1.0.5-r2\libraries\Servo/Servo.h:83: error: ‘_Nbr_16timers’ has a previous declaration as ‘timer16_Sequence_t _Nbr_16timers’
D:\arduino-1.0.5-r2\libraries\UF_uArm/VarSpeedServo.h:112: error: conflicting declaration ‘typedef enum timer16_Sequence_t timer16_Sequence_t’
D:\arduino-1.0.5-r2\libraries\Servo/Servo.h:83: error: ‘timer16_Sequence_t’ has a previous declaration as ‘typedef enum timer16_Sequence_t timer16_Sequence_t’
D:\arduino-1.0.5-r2\libraries\UF_uArm/VarSpeedServo.h:133: error: conflicting declaration ‘typedef struct ServoPin_t ServoPin_t’
D:\arduino-1.0.5-r2\libraries\Servo/Servo.h:101: error: ‘ServoPin_t’ has a previous declaration as ‘typedef struct ServoPin_t ServoPin_t’
D:\arduino-1.0.5-r2\libraries\UF_uArm/VarSpeedServo.h:140: error: conflicting declaration ‘typedef struct servo_t servo_t’
D:\arduino-1.0.5-r2\libraries\Servo/Servo.h:106: error: ‘servo_t’ has a previous declaration as ‘typedef struct servo_t servo_t’
Would you send your phone contact phone number to us by email? [feedback@ufactory.cc][1]
We will contact you by call. Please attach the forum link. Thanks.
[1]: mailto: feedback@ufactory.cc
Hi,
I’m having a similar problem with my metal u-arm. Following the calibration process as for the plastic version explained on YouTube but at the end of the process the arm refuses to go to its home position, instead resting in semi extended position.
Any ideas anyone?
Hi there, sorry for our mistake. There is some difference between acrylic and metal calibration. We have upload the instruction for metal in our download page and you can get the information about the correct calibration. Thanks
here is the link
Thanks for that I’ll give it a try.
Mouse control for Mac?
Hi, Mouse Control is built by Visual studio, only works on Windows. You could use uArm Client which is more powerful, support Camera and Leap motion control.
You could download it here.
Click here.
Hi, I am also having trouble with calibrating my acrylic uArm. This uArm came preassembled… here is a video of my calibration attempt: https://youtu.be/Wi-_DSRdXvg
As you can see from the video the uArm does NOT return to home position and instead extends way below the level of the base. I am using the latest uArm library, released Mar 4 on github.
Any help is much appreciated thanks.
Hi Jessica,
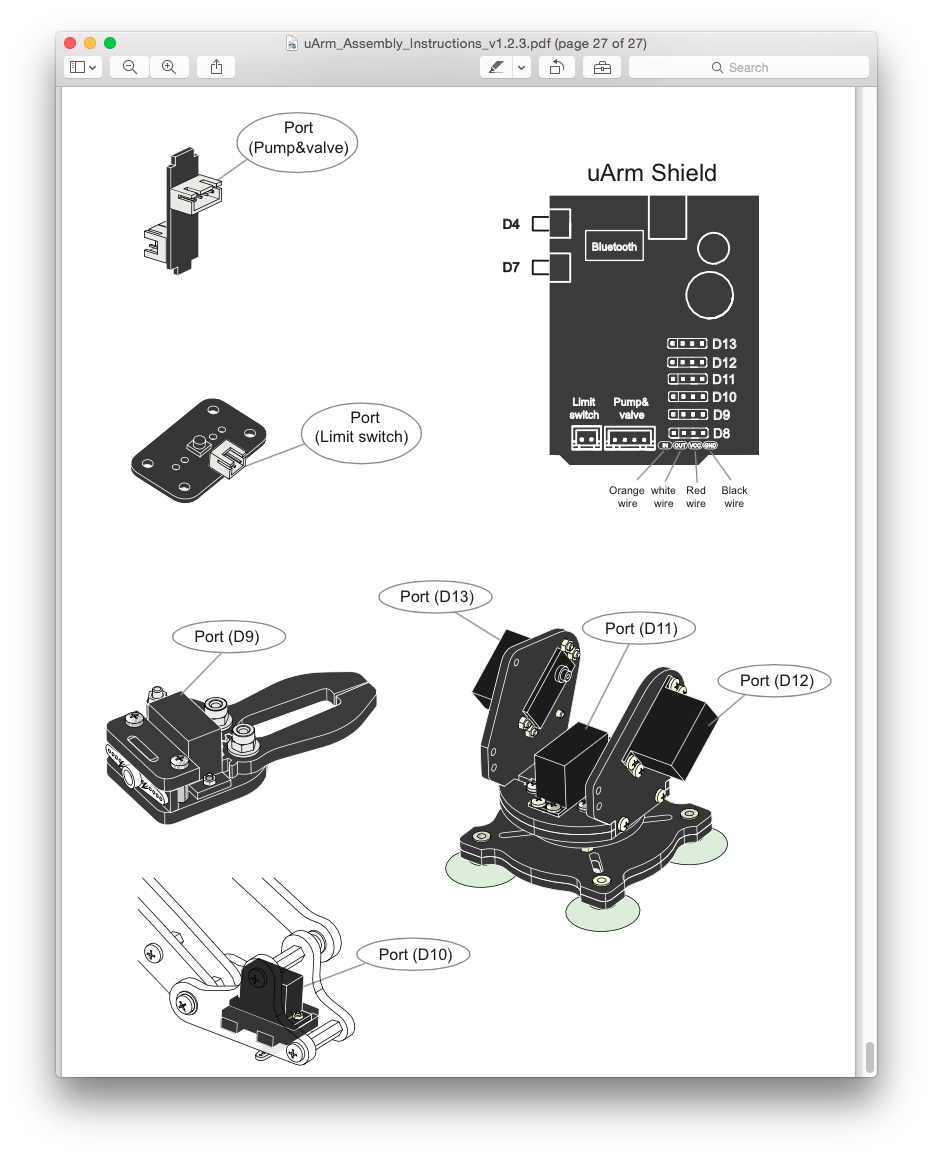
First please double check the servo PIN connect to uArm Shield correctly. you could reference the below page, or Download the uArm Assembly Instructions v1.2.3 the final page.
Second, Have you ever disassembled the uArm?
If yes, please double check the uArm Assembly Instructions v1.2.3 Section 34, 35, 46. Ensure the rotation is correct.
Hi,
i have trouble with calibration of my metal uArm. Followed the instructions in - YouTube, but still the arm don’t reach home position.
Any help appreciated thanks.
我的是uarm metal的,有木有國內視頻連接啊,youtube打不開啊,說明書也沒有metal版的校驗,壓根沒有那B10 & B11
Hi
I am looking for the documentation related to uARM metal. The schematic and PCB files are not available in the download centre. Can you share the same.
Hi,
You can download the schematic and PCB files from the link: http://evol.net/downloads/source_files/uArm_Metal_PCB.zip
i am also having the same problem .
I can’t successfully verify the uArmcalibration.ino on V1.0.5 Arduino IDE.Many errors come out.
sorry my arduino version is 1.6.5