Planning continuous motion must meet:
(1) xArm needs to use circular arc linear motion instruction when doing TCP motion, xArm’s joint instruction currently cannot plan continuous motion.
(2) Radian: R≥0, wait = False (do not wait). It is generally recommended that R> 0.
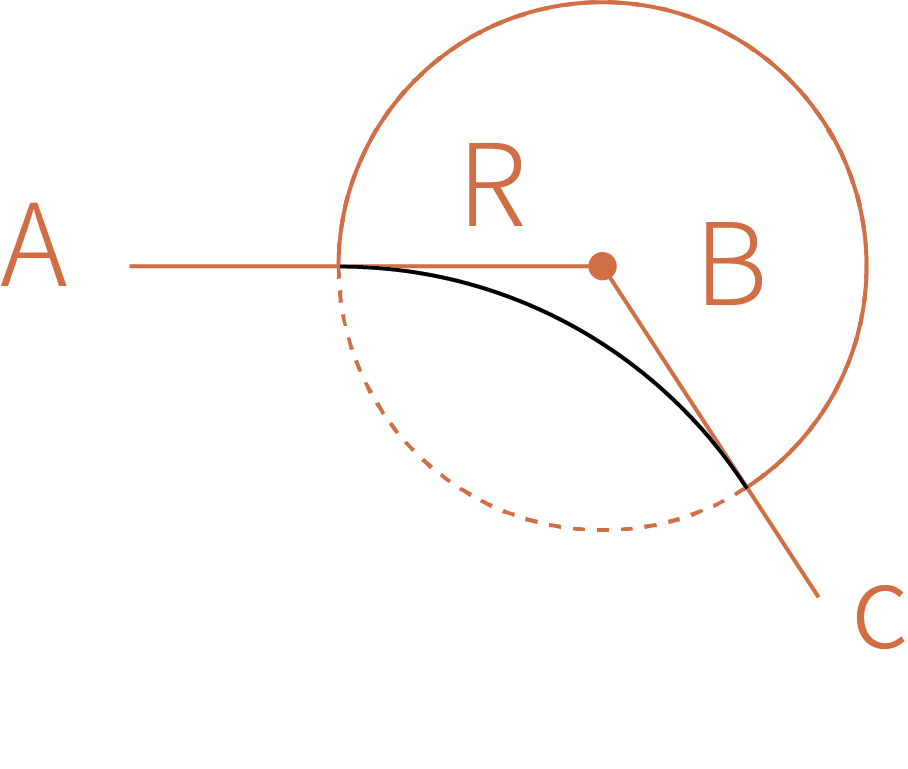
Figure 1 (∠ABC = 90 °)
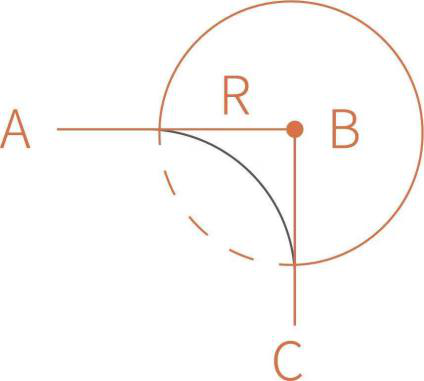
Figure 2) (∠ABC is any angle)
The above picture is an example. If you set R = 0, the speed of Lineb is continuous, and the turning speed at point B is 500mm / s. The turning effect is very sharp, and the effect is similar to the rigid body collision rebound. Above: ∠ABC = 90 °, from A to B to C, the speed is 500mm / s. It can be seen that at point B, the speed from A to B will be reduced to zero, and the speed from B to C will increase to 500mm / s, the theoretical acceleration for deceleration and acceleration is infinite. So it is not recommended that R = 0. Setting R> 0 will get a relatively smooth turning effect. The parameter (wait = fales) is set to accept the next instruction for planning. If wait = True, you need to wait.
(3) The robotic arm does not move immediately after receiving the instruction. It is necessary to set a waiting time and wait for multiple instructions to plan together. A single instruction cannot be continuous. The python interface is set_pause_time.
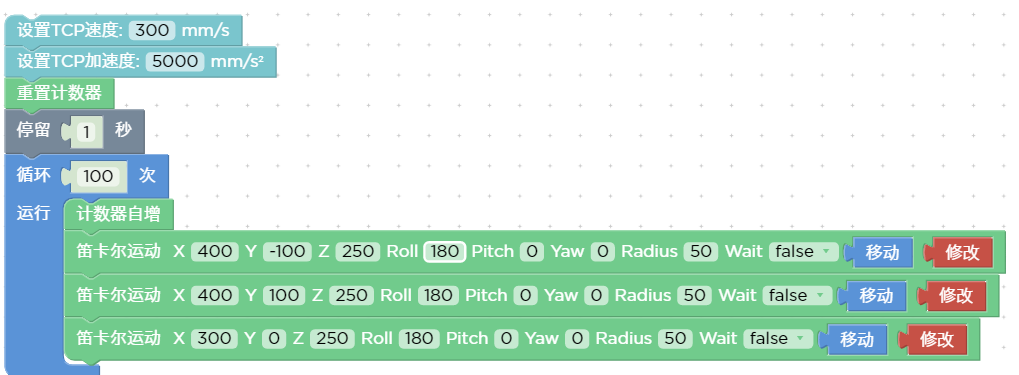
Blockly code example:
Python code example:
import os
import sys
import time
sys.path.append (os.path.join (os.path.dirname (file), ‘… /… /…’))
from xarm.wrapper import XArmAPI
arm = XArmAPI (‘192.168.1.221’)
arm.motion_enable (enable = True)
arm.set_mode (0)
arm.set_state (state = 0)
arm.reset (wait = True)
speed1 = 200
arm.set_pause_time (0.5)
while True:
arm.set_position (x = 400, y = -100, z = 250, roll = 180, pitch = 0, yaw = 0, radius = 50, speed = speed1, wait = False)
print (arm.get_position (), arm.get_position (is_radian = True))
arm.set_position (x = 400, y = 100, z = 250, roll = 180, pitch = 0, yaw = 0, radius = 50, speed = speed1, wait = False)
print (arm.get_position (), arm.get_position (is_radian = True))
arm.set_position (x = 300, y = 0, z = 250, roll = -180, pitch = 0, yaw = 0, radius = 50, speed = speed1, wait = False)
print (arm.get_position (), arm.get_position (is_radian = True))