UFACTORY Forum
How to reduce the flutter of the xArm motion
xArm Wiki
Daniel
July 21, 2020, 9:09am
1
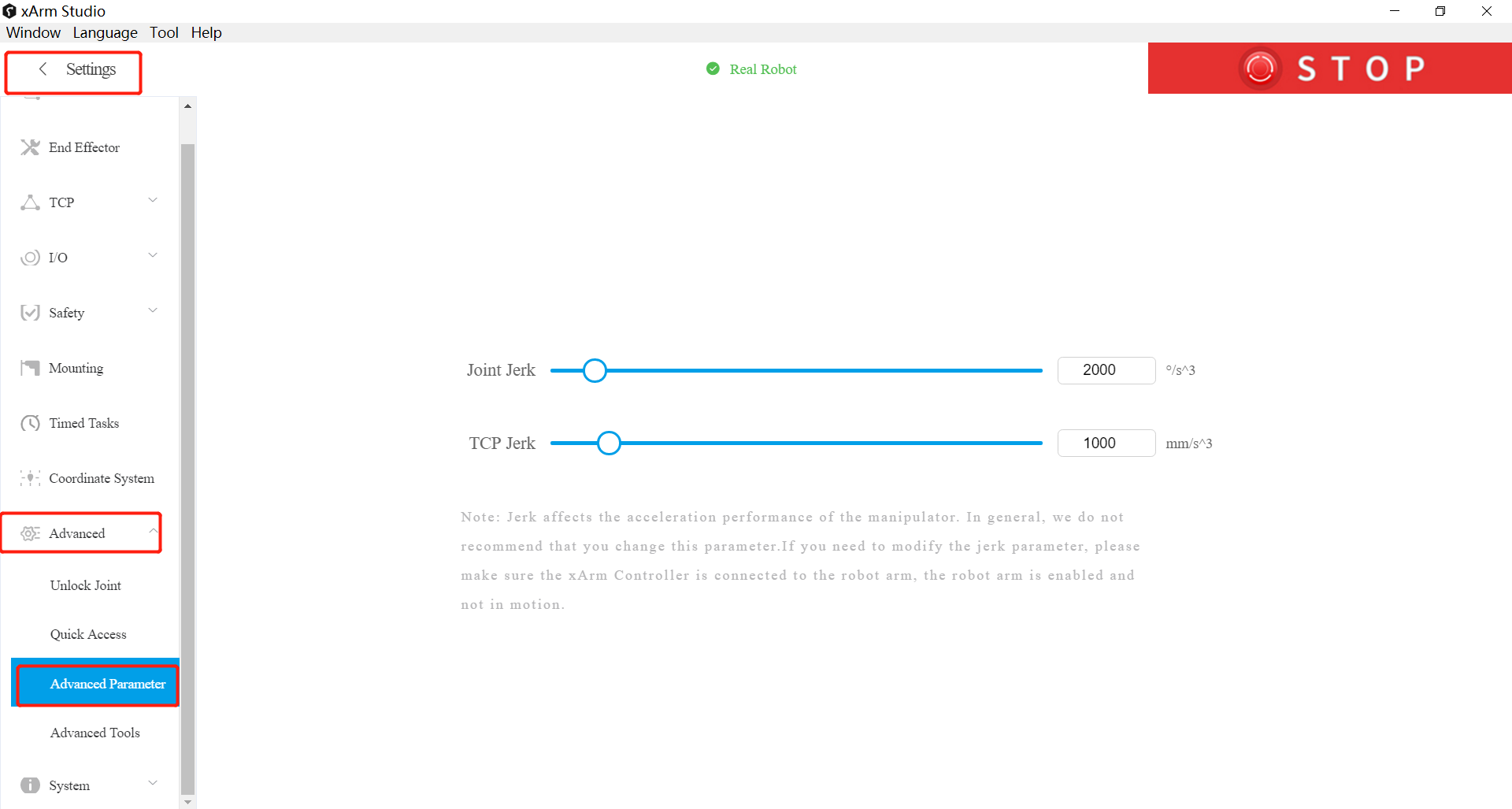
(1) Reduce the TCP jerk
image
1920×1027 84.2 KB
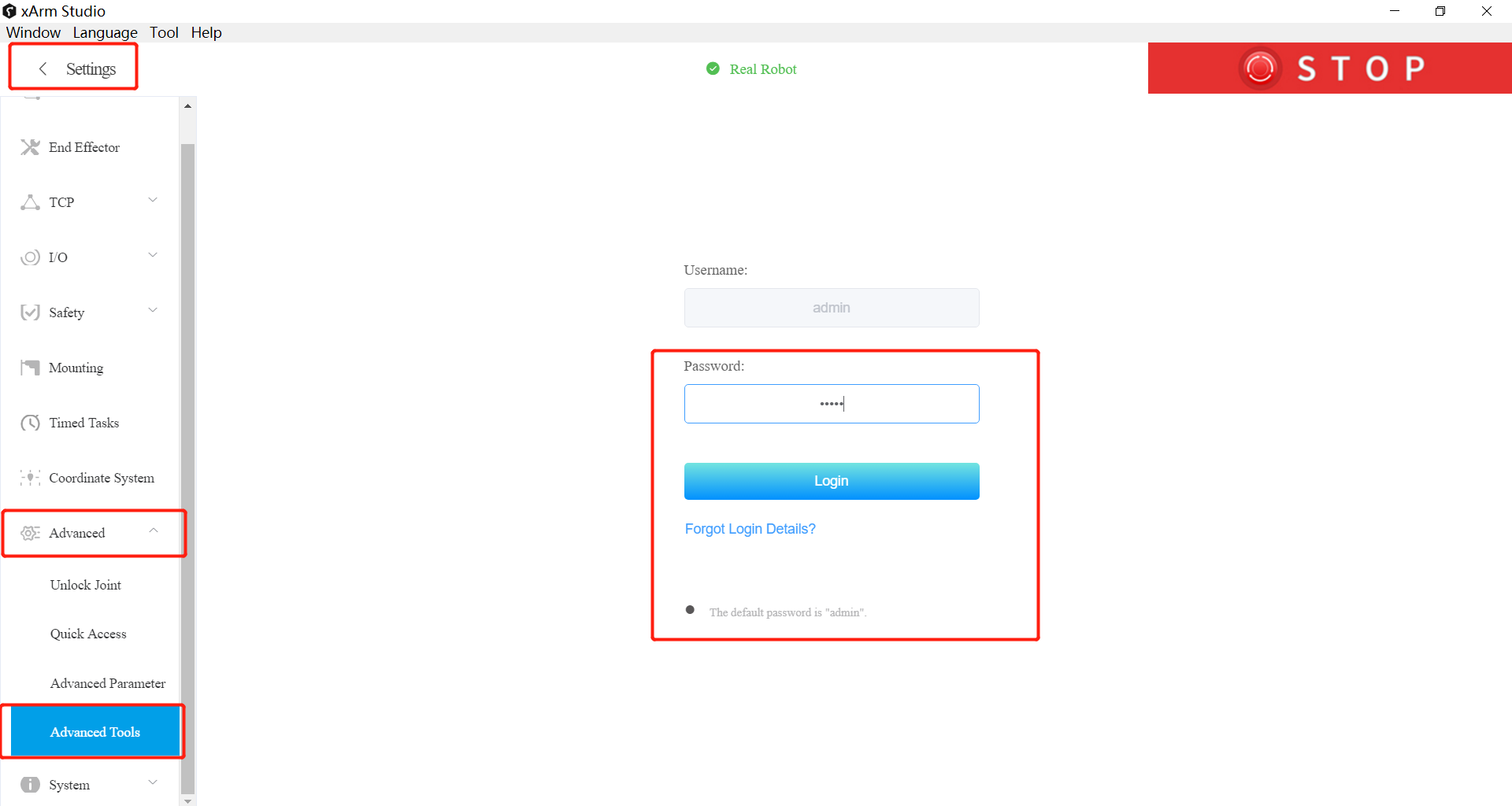
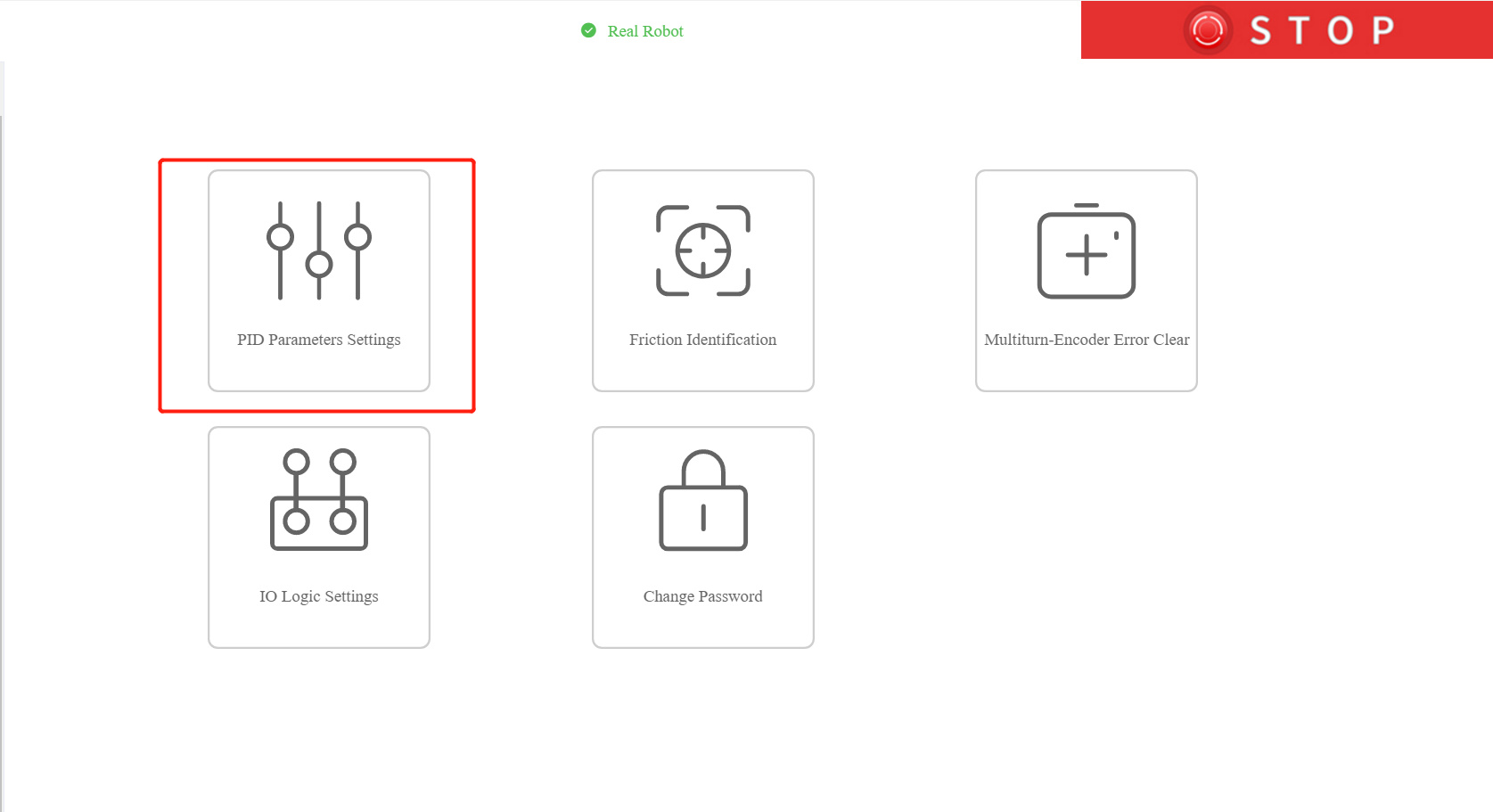
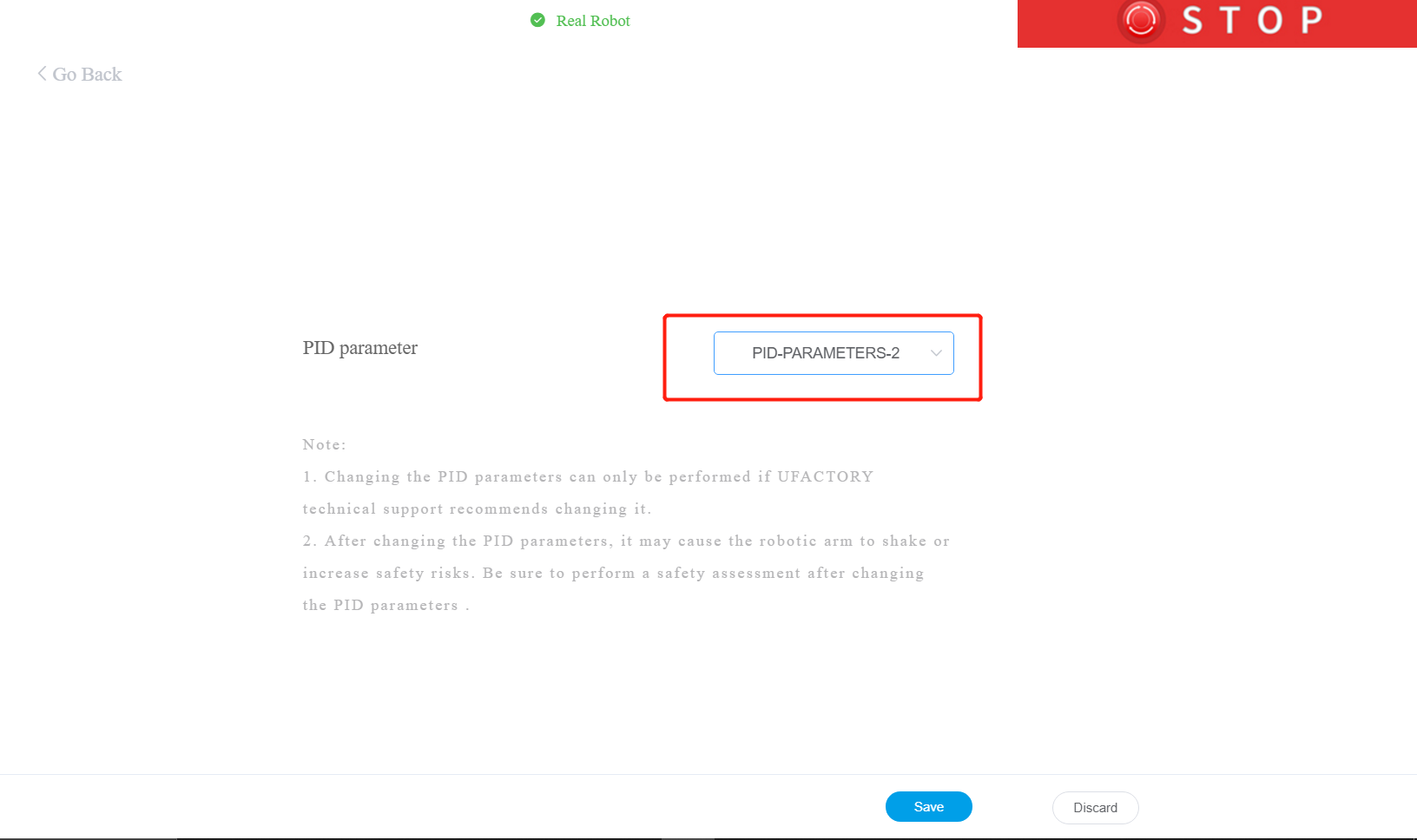
(2) If the robot is flutter after attach a heavy payload(for example more than 3 kg), you could try to change the PID paramter of the robot. Choose the “PID-PARAMETERS-2” and save.
image
1920×1024 72.9 KB
image
1675×911 80.6 KB
image
1632×968 56.1 KB