Hi,
I was wondering if someone has come across a similar situation before. I simulated a motion plan on Ufactory Studio Simulation and it worked. However, when I ran the same scripts on the real robotic arm, it gave me the error “kinematic error C21” after the first motion.
The plan started with linear motions and worked for the first movement. However, the execution was blocked when the “pitch” was configured from 0 to 20°.
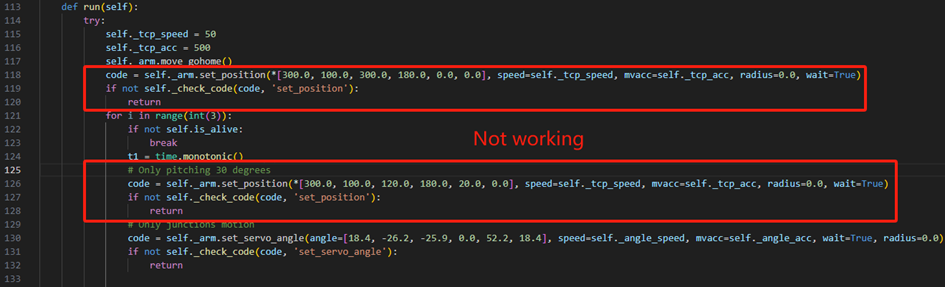
I also read the real-time degrees of each junction and found that they didn’t seem to exceed their working limits. Does someone have a clue of this issue? Thanks!
Kind regards,
Lee