Hi. I would like to ask about the Modbus-TCP communication written on the developer manual. I would like to ask about some parts:
TCP connection means the ethernet cable connection between computer and controller?
Is there any SW or platform for me to send the modbus messages? I found on the forum someone used Hercules Setup Utility to send/receive data.
Thank you
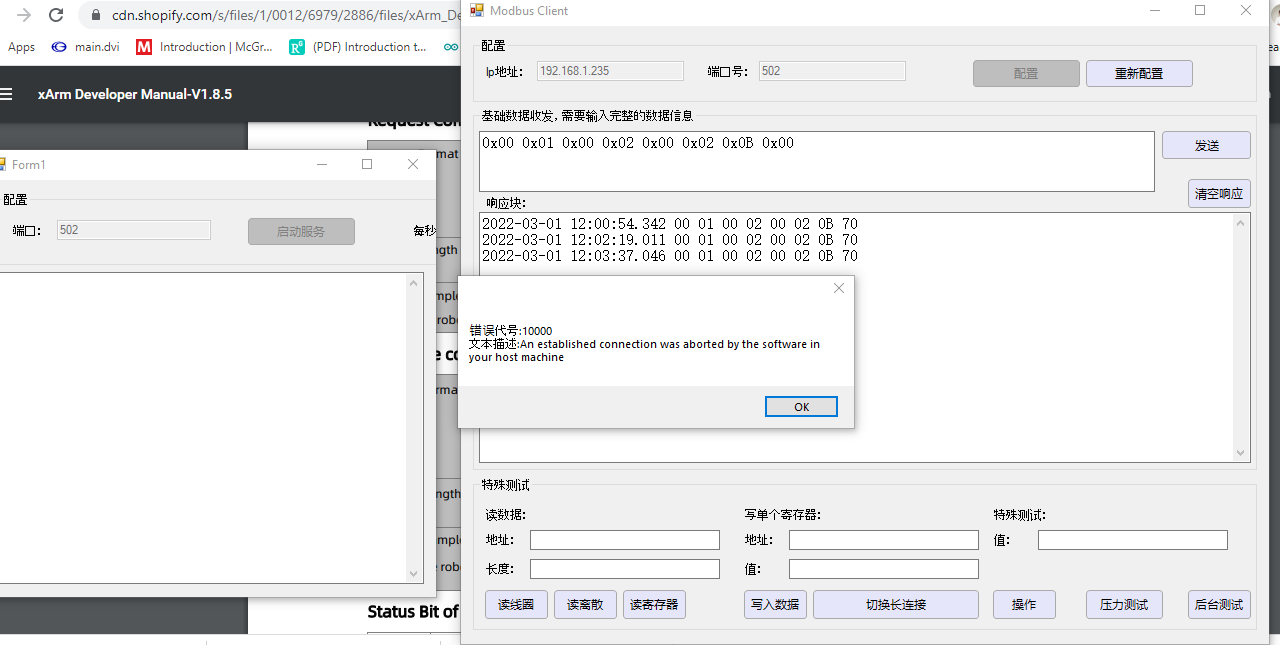
Thank you for the software. By the way, I just tried to use it and it works for sending command of enabling the robot. However, if I send response command, I get pop up notification as in the figure. Do you why?
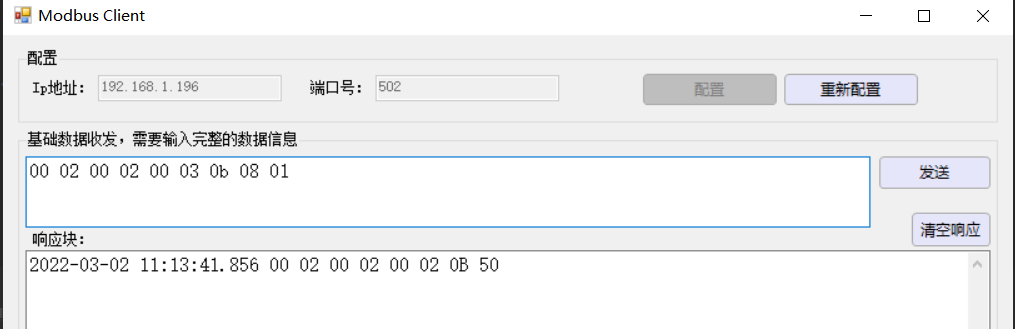
Yes correct. It worked for me if I send request command as in the developer manual. But, sending response command, it showed like I said before (pop-up error 10000: An established connection was aborted by the software in your host machined).
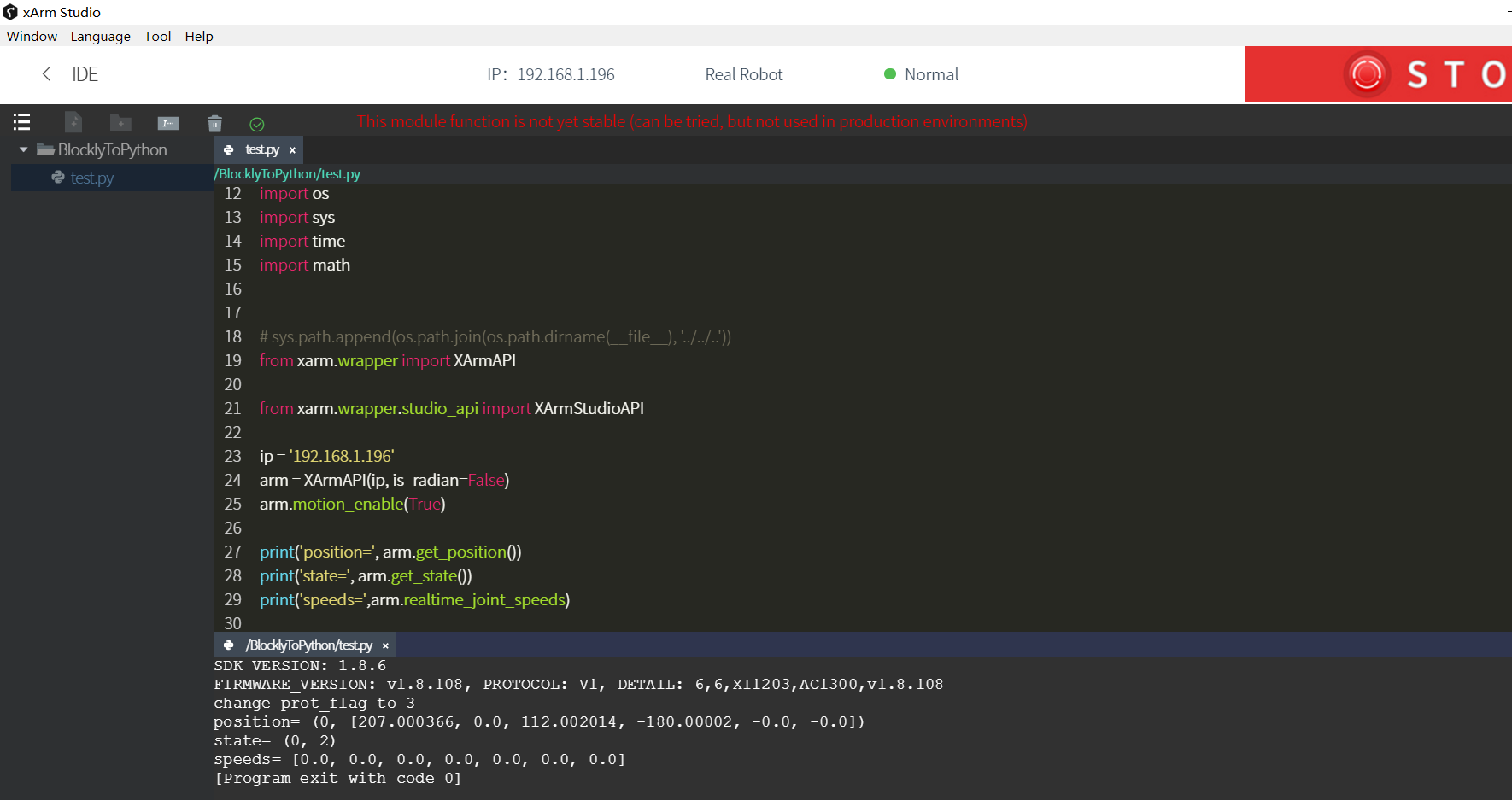
Anyway, is it possible for me to read the status or get data of the robot (such as speed, acceleration, position, etc) using python inside xArm studio? Since if using modbus tcp, the developer manual has guidance how to send the response command to robot