uArm Serial No.: UARM-6CC374F653D4
Firmware Version: 3.2.0
Operation System: Win10
uArm Controlling Method: Arduino/Python 3
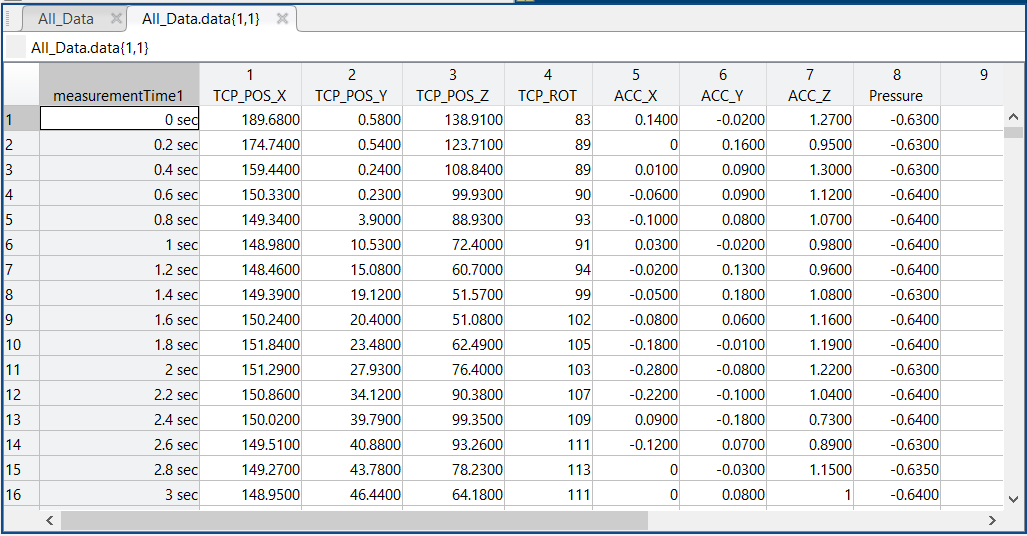
I am using “swift.register_report_position_callback” to report position each 0.2 sec interval. I would like to know the readings I am getting for (X,Y,Z) and a fourth entry is it rotation and how I can interpret it.