Firmware Version: Latest
Operation System: Ubuntu 16.04
uArm Controlling Method: ROS kinetic
Hello, I have some problems when I try to control UArm via ROS, and I hope that I could receive the help from here.
I have installed ROS kinetic via sudo apt-get install ros-kinetic-desktop-full, and when I tried to follow the samples as what https://github.com/uArm-Developer/SwiftproForROS README shows, entered the Command Line:
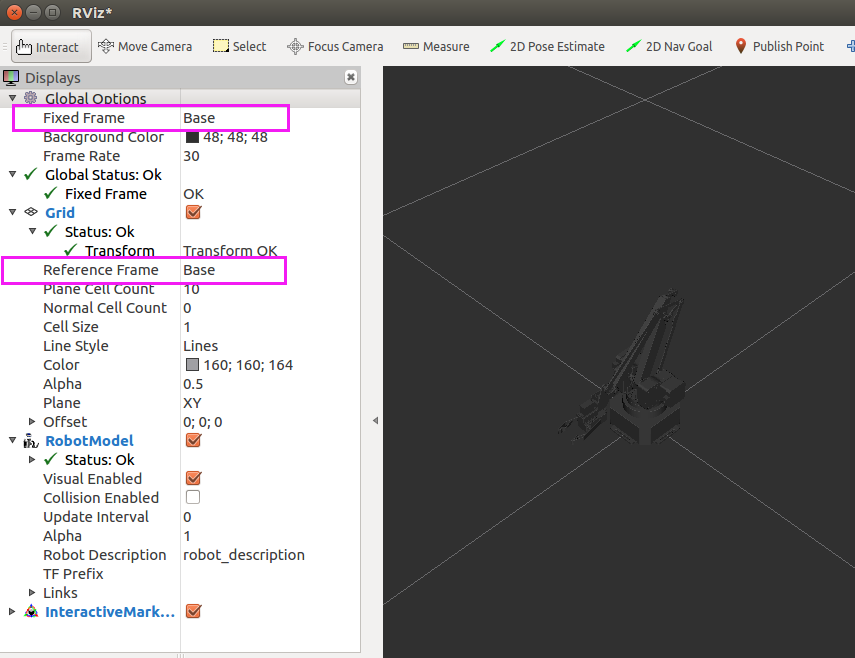
roslaunch swiftpro display.launch
I got this:
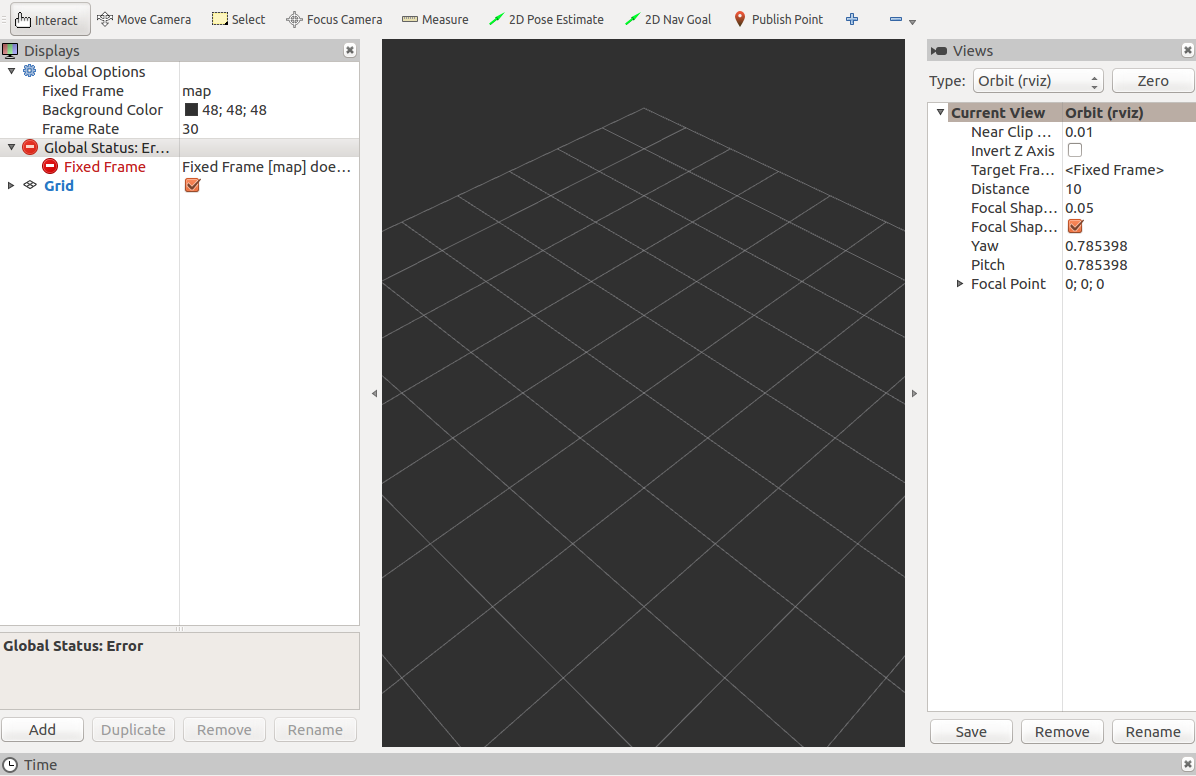
Fixed Frame
Fixed Frame [map] does not exist
and the Linux terminal showed that:
SUMMARY
PARAMETERS
- /robot_description: <?xml version="1…
- /rosdistro: kinetic
- /rosversion: 1.12.7
- /use_gui: False
NODES
/
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz (rviz/rviz)
swiftpro_read_node (swiftpro/swiftpro_read_node)
swiftpro_rviz_node (swiftpro/swiftpro_rviz_node)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[swiftpro_rviz_node-1]: started with pid [6514]
process[swiftpro_read_node-2]: started with pid [6515]
process[robot_state_publisher-3]: started with pid [6523]
process[rviz-4]: started with pid [6535]
[ERROR] [1506389935.554633158]: Inverse kinematic is wrong
I don’t know what happen, and I sure that the connection between UArm and PC is in the right way.
Thanks.
UFACTORY Website
Official Store
uArm User Facebook Group
Feedback:
English Channel
中文通道