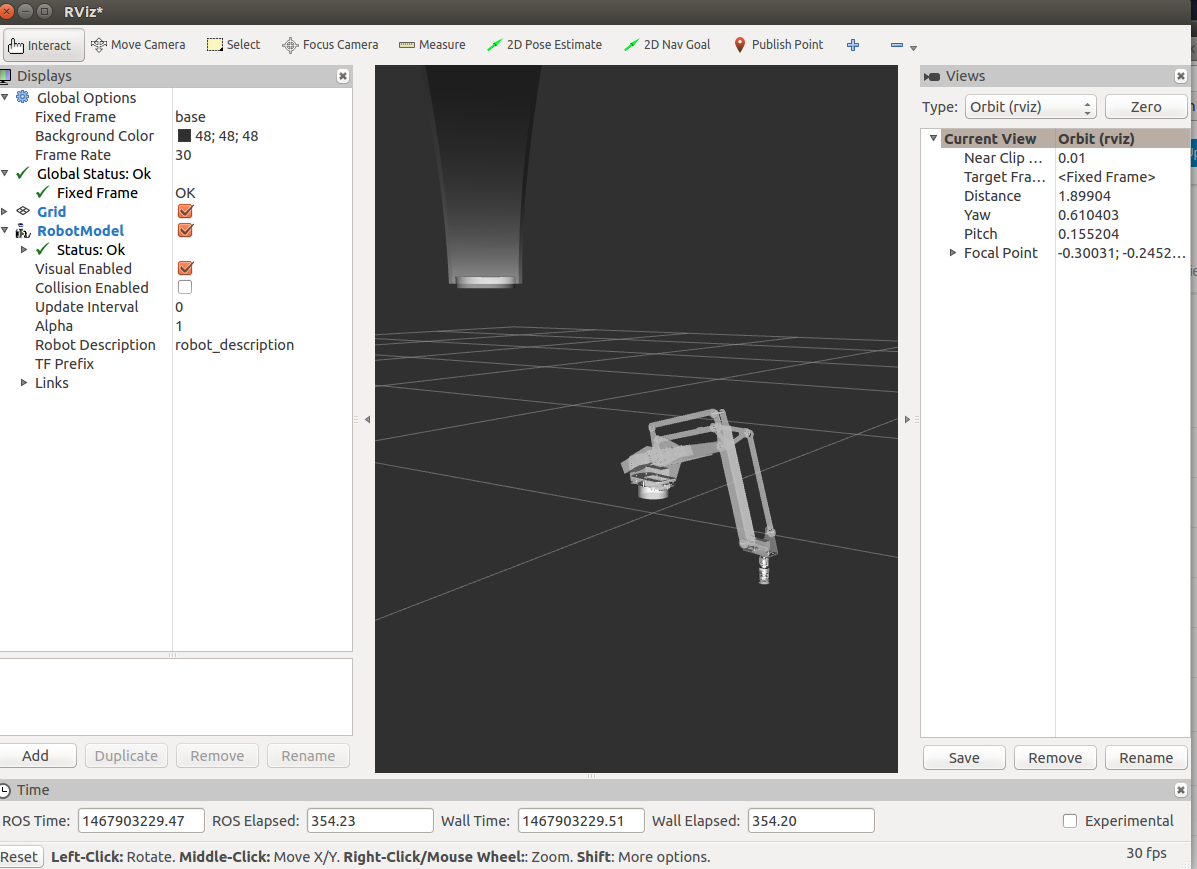
Hello, I’m trying to visualize the uarm in the rviz. I’m able to display the uarm, however the base is not connected to the other parts of the arm (see the pictures). Any idea how can I solve this?
– Mss
Hello, I’m trying to visualize the uarm in the rviz. I’m able to display the uarm, however the base is not connected to the other parts of the arm (see the pictures). Any idea how can I solve this?
– Mss