I was trying to get my new xArm 5 to its zero position, the joint angles were so high, and it was indicating “joint angle exceeded, press and hold Zero position”, I did that and there was a collision on itself, now it shows unable to connect, so I can’t communicate with the robot using ufactory studio, but when I ping, it’s shows it’s connected.
I sent emails to support@ufactory.cc but no response, please how do I bring it to original position using Ufactory studio.
Hi Charlie,
It was the weekend yesterday, we didn’t work.
As we discussed at the Intercom, the arm has not been used for a long time, the encoder data is lost, please reset the zero position of each joint according to the provided steps, thank you.
Best regards,
Minna
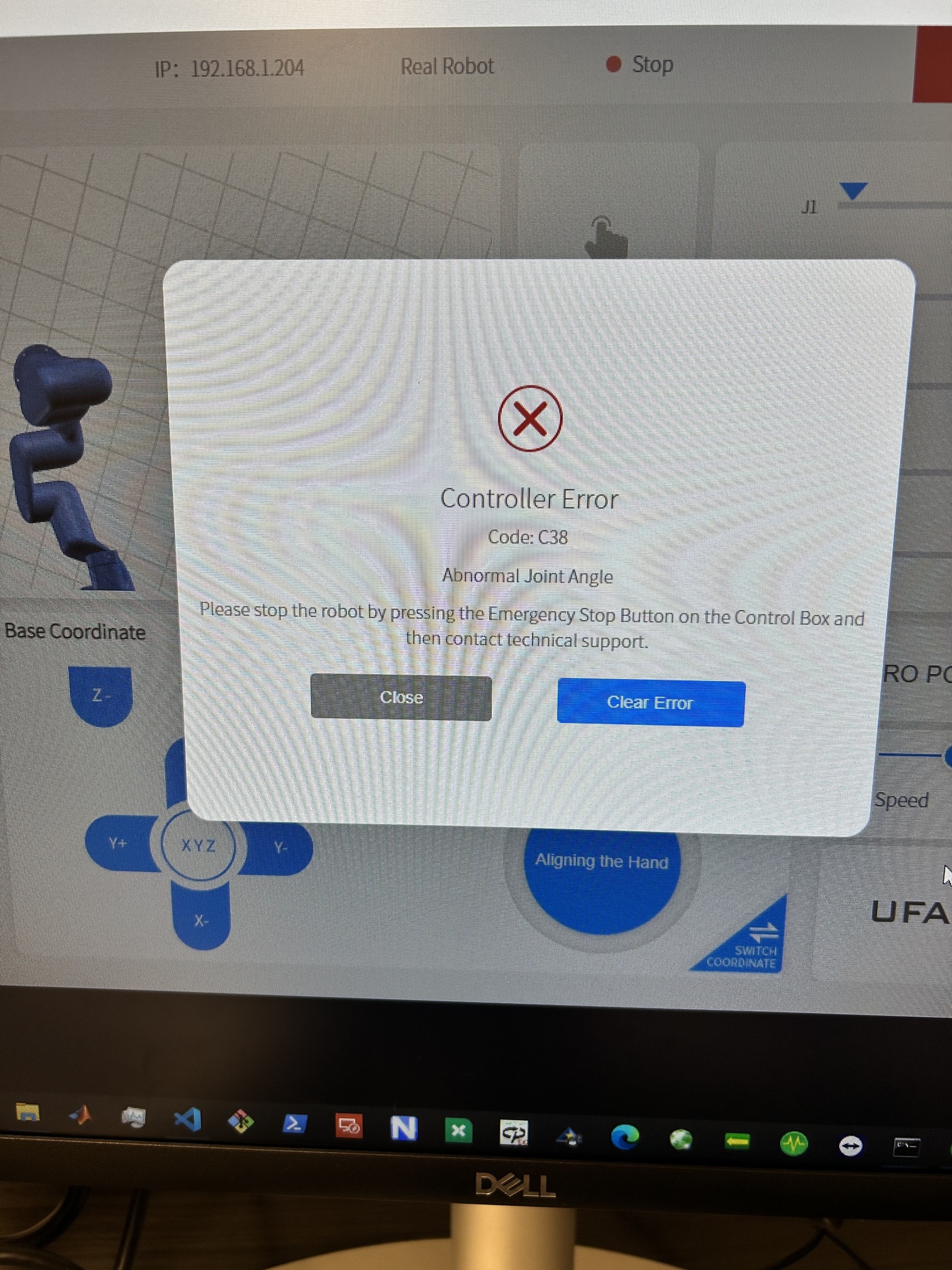
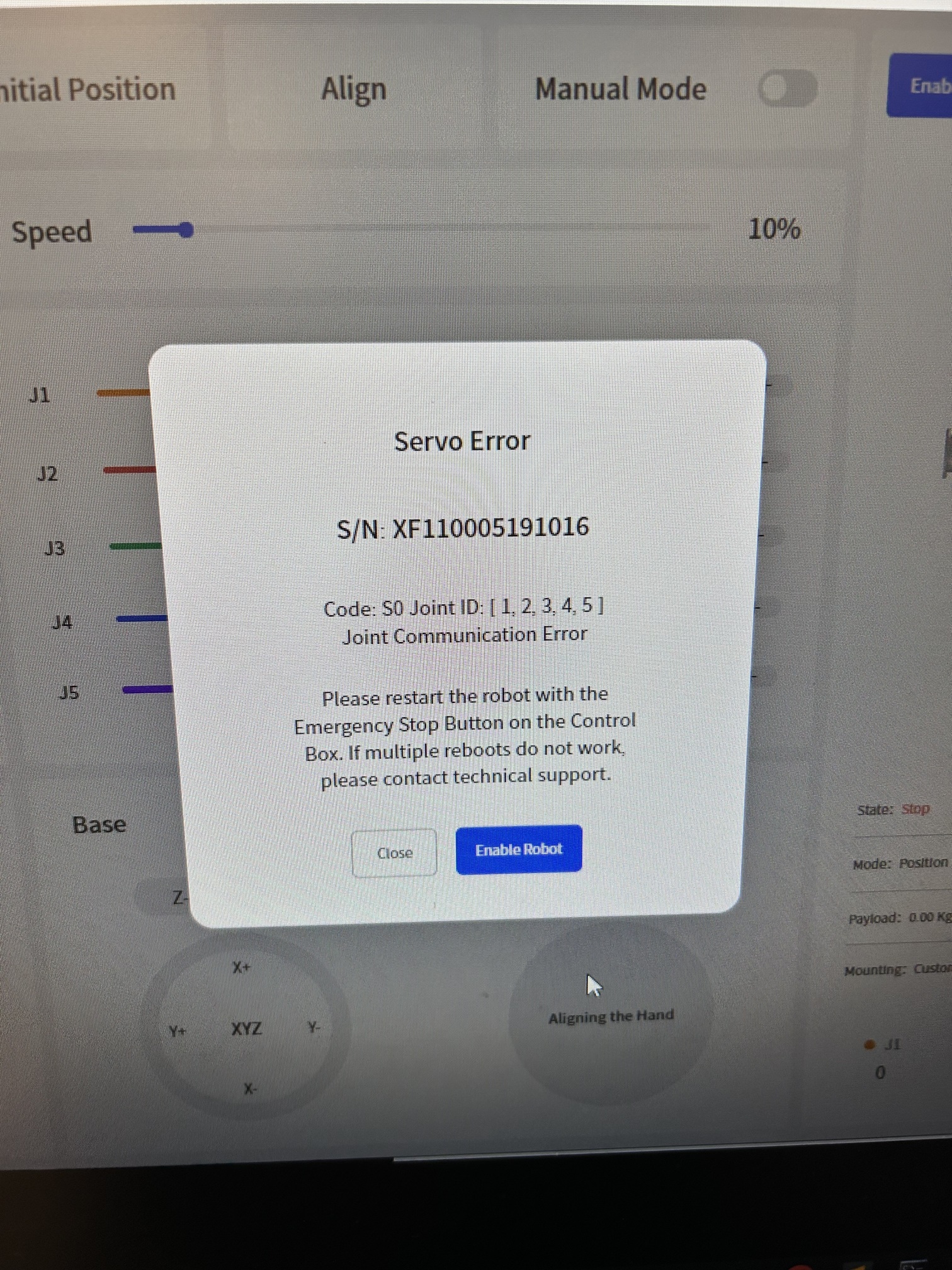
Hi Minna, thanks for you tremendous help in fixing my issue with the robot arm, I have similar issues with 2 other xArm5 tried all I can but still can’t fix the error, find attached the error. I have been able to update the firmware and studio, still can’t fix the error.
Hi Charlie,
I already remote-controlled your PC and solved it today.
Please note that you need to power on the arm every 3 months to charge in the build-in battery, otherwise the encoder data may be lost.
Best regards,
Minna