I’ve had my xArm6 for about a month and I love it. The performance for the price is just fantastic, and because of its low price compared to KUKA, Universal Robots, FANUC, etc, I suspect the uFactory robots attract users like me: prosumer, scrappy, DIYers who want to do all sorts of things with their robot without breaking the bank.
To that end, it would be fantastic if a future version of the xArm had a USB passthrough from the base of the bot to the end effector area (in addition to modbus). Literally as simple as USB-C wiring strung through the arm the way the modbus end effector is implemented today.
A few use cases:
USB cameras for inspection & object recognition, thermal cameras, etc.
Arduino and other microcontroller devices communicating over Serial
Power over USB for 5V devices
Of course, if the USB is bypassing the control box and going straight to a PC, it won’t be available for commands running on-device. But in my scenarios where I’m using the SDK to control the robot from my PC anyway, that would be just fine.
I realize that’s not the “way things are done” in industrial scenarios, but for scrappy hobbyists and independent makers, I think it would open up a very cool set of possibilities.
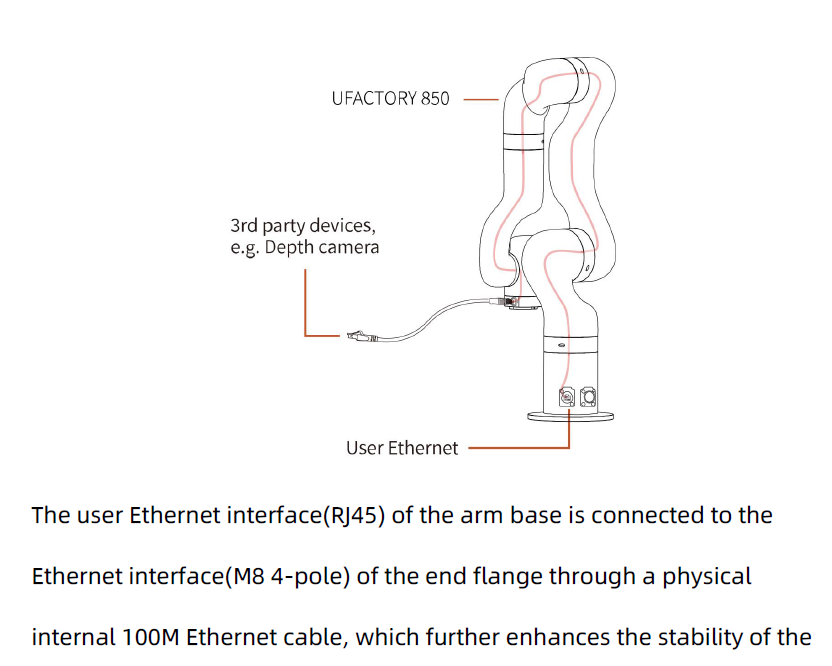
There are many communication ways, for example, RS-485, USB, … We chose to add a physical internal 100M ethernet cable to our new product UFACTORY 850, you may have a look, it is a standard CAT5 ethernet cable and is compatible with most 3rd party vision devices, I think there should be a way can convert USB data to Ethercat data, and I understand the USB-C is better in some application.
We have no plan to modify the xArm series for now, thanks for your suggestion, we will consider it in the further future.
Yes, this is precisely to avoid external wiring. If I wanted to add a USB camera to the end of my robot today, external wiring would require a lot of effort (and would look messy).
Also, if I were to build a custom end effector for my use cases, I would default to using a microcontroller like an ESP-32 or similar. Although it’s possible to communicate with those kinds of microcontrollers via RS-485 and ethernet, the default and universally supported method of communication is serial over USB. Plus, USB-C is capable of providing significant wattage to the end effector tool.
It’s also trivial to add a USB-to-Ethernet dongle to transport ethernet over USB, but perhaps not so trivial to go the other direction.