I haven’t powered on my xarm6 in about a year, but have a new project that it can be useful for (data collection)
I initially got a bunch of multi-turn encoder errors, followed some helpful tips on this board, and reset the errors, but to no avail.
I also saw the issue here describing the effects of long dormant machines, and decided this was likely the cause.
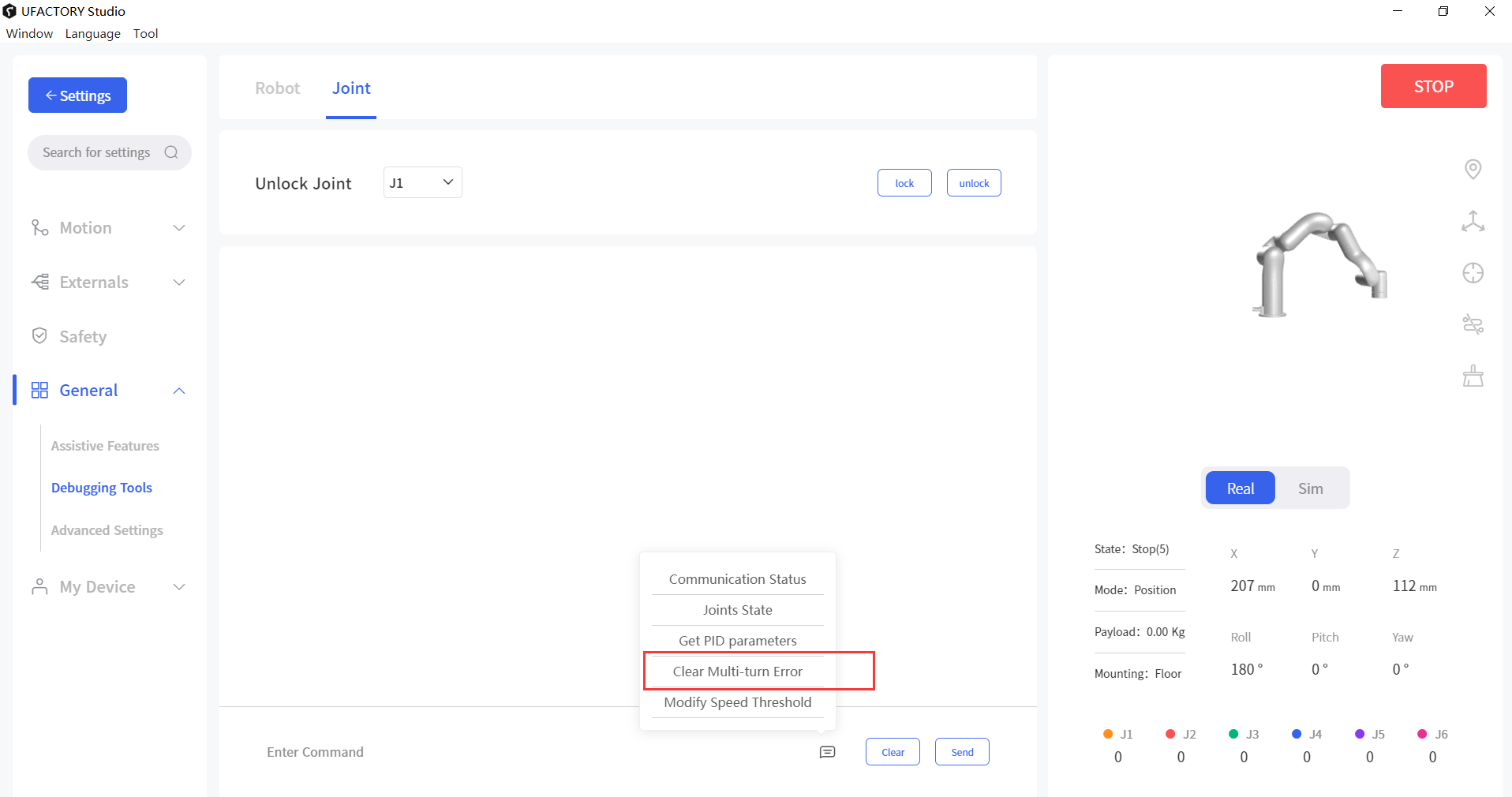
I also updated the firmware on the arm to 2.4.0 using the gui tool, and tried to reset the multi-turn error through the new interface as well, but to no avail.
Also, it seemsI can’t copy/paste errors from the xarm studio, so I downloaded the logs from the arm, and included the relevant error codes from there.
here are the error codes in xarmcore/xArmError.log:
[CRITICAL][2024-08-28 04:04:51][loops.py:569] - - OnErr → code=11
[CRITICAL][2024-08-28 04:04:51][loops.py:734] - - Servo-1, status: 1, code: 18, info: Multi-turn Encoder Error , mu_code: 134
[CRITICAL][2024-08-28 04:05:42][loops.py:734] - - Servo-2, status: 1, code: 18, info: Multi-turn Encoder Error , mu_code: 6
[CRITICAL][2024-08-28 04:05:43][loops.py:734] - - Servo-3, status: 1, code: 18, info: Multi-turn Encoder Error , mu_code: 134
[CRITICAL][2024-08-28 04:05:43][loops.py:734] - - Servo-4, status: 1, code: 18, info: Multi-turn Encoder Error , mu_code: 134
[CRITICAL][2024-08-28 04:05:43][loops.py:734] - - Servo-6, status: 1, code: 18, info: Multi-turn Encoder Error , mu_code: 6
[CRITICAL][2024-08-28 04:05:43][loops.py:569] - - OnErr → code=14
[CRITICAL][2024-08-28 04:05:43][loops.py:569] - - OnErr → code=16
[CRITICAL][2024-08-28 04:05:45][loops.py:569] - - OnErr → code=11