-
有谁知道怎么在ros的gazebo模拟uArm,不需要连接真实的uArm?
-
uArm的moveit!有谁验证过?
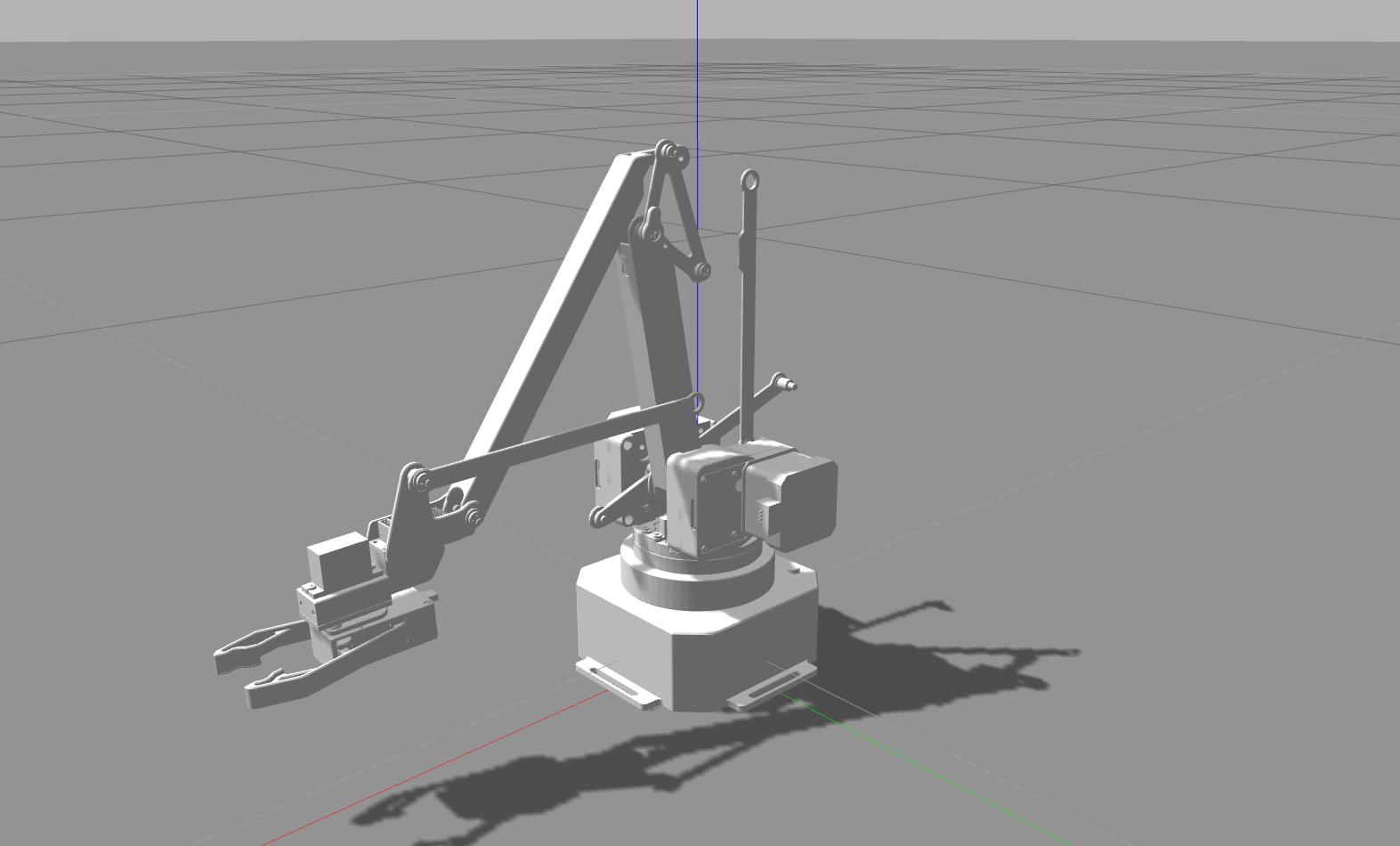
我试图创建gazebo中显示的xacro(urdf)文件,遇到一些困难,(原因是自己不是很熟gazebo,简单的还可以)像dae格式的文件加载不上, 比如加载urdf/daes/base_rot.dae 总是报错。
有谁知道怎么在ros的gazebo模拟uArm,不需要连接真实的uArm?
uArm的moveit!有谁验证过?
我试图创建gazebo中显示的xacro(urdf)文件,遇到一些困难,(原因是自己不是很熟gazebo,简单的还可以)像dae格式的文件加载不上, 比如加载urdf/daes/base_rot.dae 总是报错。
我之前試過 dae 沒有問題,是在 Linux 系統下用 Blender 導出,你可以參看我的項目,uarm for gazebo: GitHub - dukelec/uarm4gazebo: uArm metal for gazebo
計劃中。。。