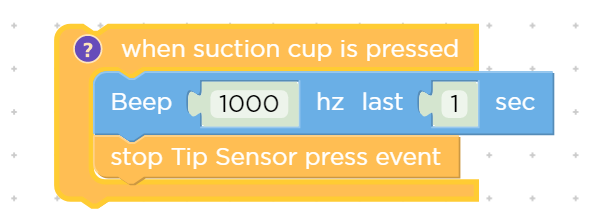
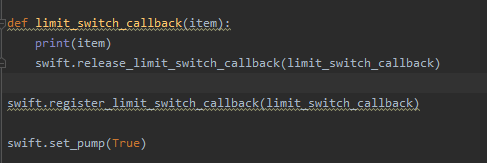
I have used uArm studio blockly and would like to move on to the python SDK for more advanced functions. I was reading the API documentation in the doc/.docx file for the Python SDK on GitHub - uArm-Developer/uArm-Python-SDK: New python library for Swift, Swift Pro and noticed there is no function to get status of tip sensor. In blockly, there is a block for when suction cup pressed which translates to javascript status of tip sensor. I could not find any tip_sensor functions in python or arduino. The best alternative was get_pump_status() output value 2 for if the suction cup has sucked onto something.
Am I missing something out or has tip sensor not been implemented in the sdk? Any advice will be appreciated.
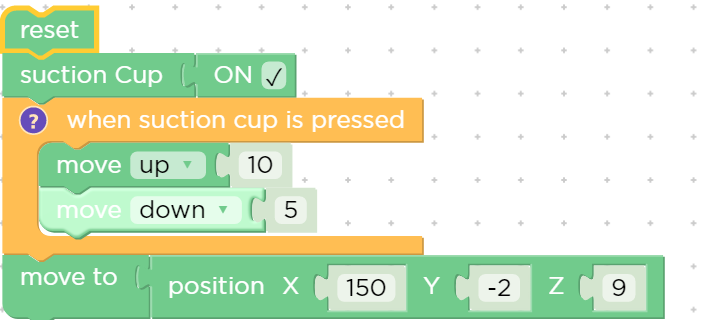
From the python SDK, we can know if the suction pump has sucked on to something through get_pump_status() output value 2. Is there an equivalent in blockly? Now I am trying to pick things up using:
Repeat until suction cup pressed:
Move down by 0.5mm
Turn on pump
But right now the arm might occasionally slam too hard into the table before picking the object up and this messes up the location encoder. I feel that using get_pump_status() would yield better results. Is there an equivalent function in blockly?
My project involves picking cards from a deck of cards. The height of the deck might be different each time and the height will also decrease after each card is picked so I’m afraid ur suggestion will not be suited.
Hi,melon
Maybe You can use the thickness of the card to estimate the position of the robotic arm each time to control the robotic arm to hold the card.