Thank you for your feedback! We’re glad to hear that you managed to resolve the issue. The purpose of our simulation environment is precisely to support users who may not have access to a physical robot temporarily, allowing them to learn and develop in a virtual environment.
If you encounter any further issues while using the simulator, please don’t hesitate to reach out. We’re here to assist you!
Thanks a lot for the input. I also managed to use the simulator for days. However, I found that, once I restarted my laptop, I couldn’t access the simulator but this can be solved by following the instructions again and removing the previous container.
This would cause some troubles because the scripts tried on the previous container would also disappear. Do you have advice on solving this?
Thanks for the feedback.
Maybe the problem is after you restarting your computer, you craeted a new container insteat of starting the previouse container. Here is the normal steps to start the previouse contrainer on Winodws. Please give a try and let me know the result.
Start the container by docker start command on your windows shell.
docker start uf_software
Enter the shell of the container
docker exec -it uf_software /bin/bash
Start the xArm 6 firmware and the ufactory studio on the shell of the container
Is it possible to connect to the simulated robot running in the Docker container via the UFactory XArm Python SDK? For example, if I want to write an example program with the Python SDK and run it on a simulated robot is it possible using this container?
I’m using the xArm Python SDK (v1.14.7) with a virtual robot that has an IP address but no serial number (SN). When calling set_servo_angle(), I get ValueError: invalid literal for int() with base 10: '' from xarm.py line 71 in _is_out_of_joint_range(). The function call flow is: set_servo_angle() → _set_servo_angle_absolute() → _is_out_of_joint_range(), where self.sn[2:6] is accessed but is empty, causing the error. Is there a way to use set_servo_angle() without requiring an SN in a virtual environment?
Right clicking on the SAVE icon when in BLOCKY, PROGRAM mode, doesn’t
“Right mouse click on the Blockly file name to download, rename,new folder,new file,import or delete the file”, as stated in manual.
Hi,
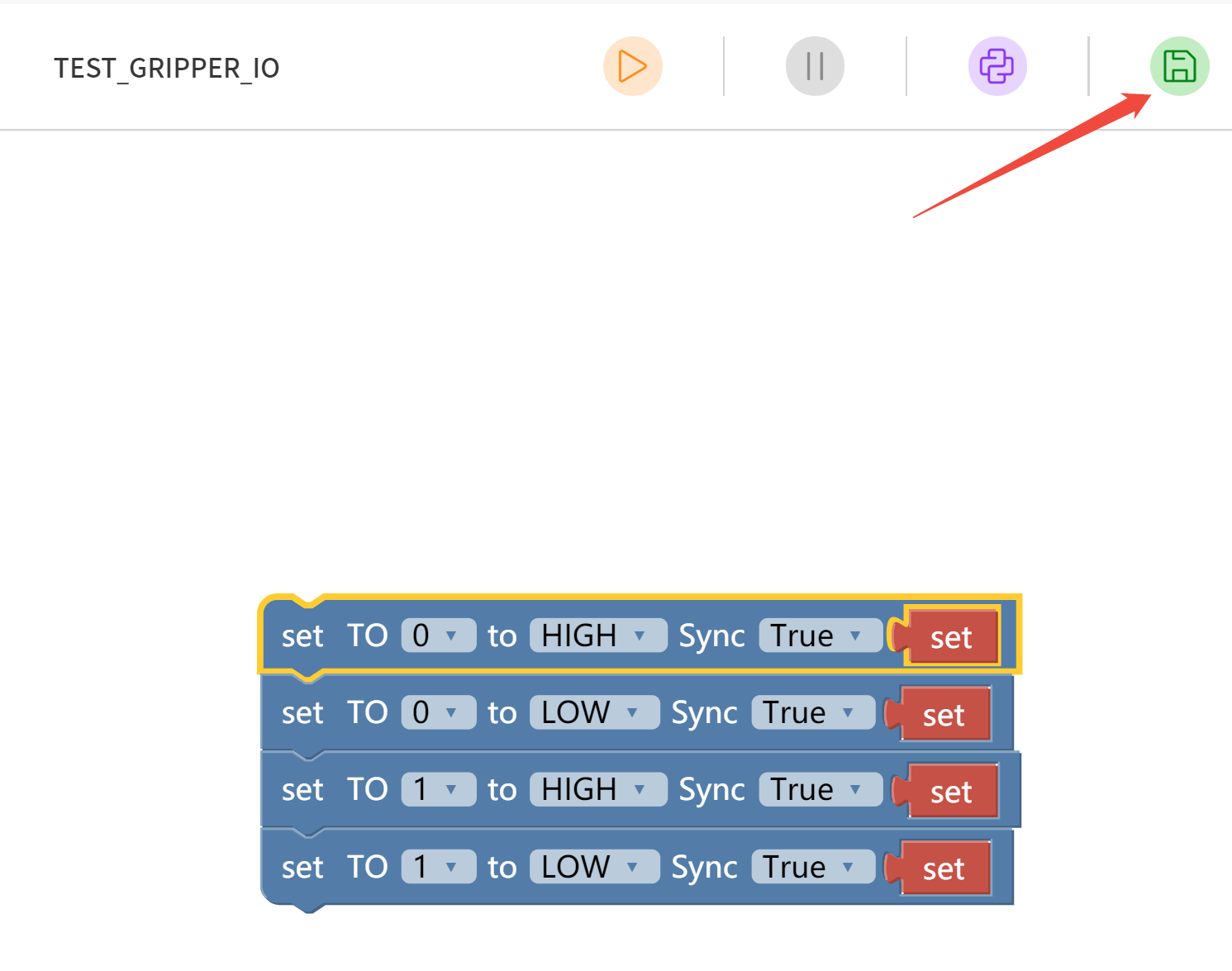
Thanks for the video. That’s the feature we called “auto save”.
If you edit the project, for example, delete one Block, you will find the “save” button change to green, means you can click the save button. And if you do not operate, 5 seconds later, it will save your project automatically and the save button change to gray, means nothing to save.
BTW, here is a new user manual
Hello everyone,
I need a simulation that can give force feedback for a project im working on (haptic feedback). And I have a question about the simulation.
Is there a way to add physical objects to the simulation or any way to receive force feedback from the simulator? (can be anything like pushing an object, pulling on a rope/spring, picking up objects with various weights)