uArm Controlling Method: uArm Studio 1.1.22
uArmCore Version 1.0.1
We’re experimenting with a uArm Swift Pro and are having serious issues with the motors making a very VERY loud drilling sound. That’s not an exaggeration, it sounds like someone has a large hammer drill.
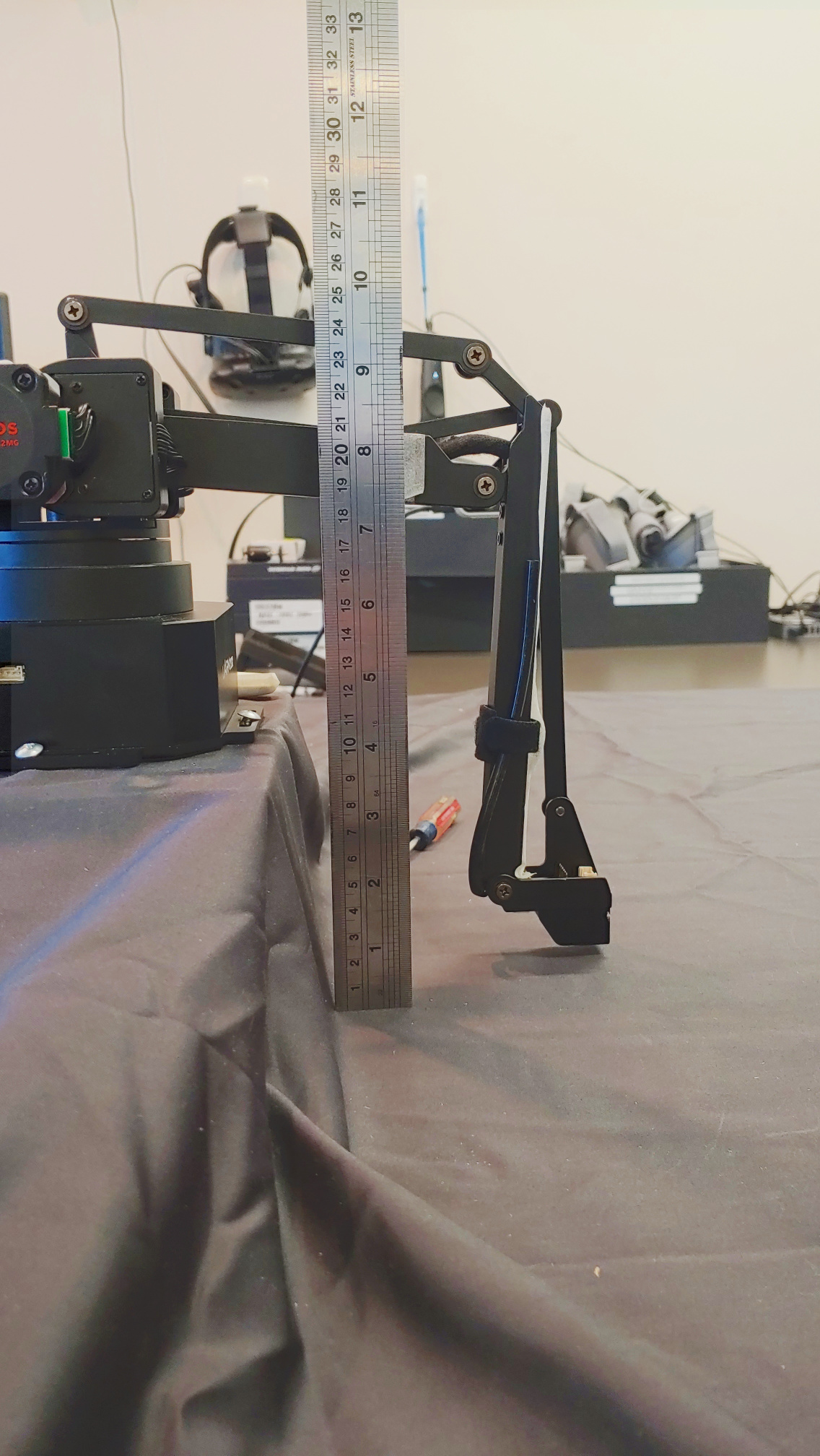
We have the uarm mounted on a square base that raises its position above a flat table approximately 12cm.
The steps to reproduce this are:
Starting conditions:
uarm is off
uarm is sitting on its raised platform.
uarm is in a resting position from gravity. The end of the arm is below the uarm’s base (the target position would be negative Z value)
Turn the arm on
Launch uArm Studio
Click the “Control” tab/page.
Immediate hammer drill sound
We also encounter this by sending commands ourselves through the serial connection.
We’ve also found a way to prevent it from happening. If we physically move the uarm while it is off into a different position, then turn it on, it seems to be fine.
If we do not do the above and turn it on in the resting position below its base, it will sound like a very loud hammer drill. We are sending it valid commands, and this is reproducible by using the uarm app “Control” page.
This is the resting position it is in when the uarm starts. It is clearly outside the range of the range of motion image from the documentation which states that -66mm in the Z axis is the absolute lowest position. Could this be contributing?
It seems that the left/right motor get the wrong angle, could you copy this link with the SN(on the bottom of the uArm) of the uArm and send to the support@ufactory.cc to get RMA service?
I actually have tried to start the uArm from that position thinking the same thing as you? That that position should have the least strain on the arm. I believe it grinded like that as well on startup, so I never did it again. I think grinding is just the uArm meeting resistance in motion and the stepper motors can’t overcome the resistance so it slips and slips causing that sound. Not a nice sound but I don’t think it causes any major damage.
The reset position (presummably the safest position) that the uArm Studio puts it in is the position I put it in (by hand approximately) when I power it up. I don’t get this grinding ever if I do that.
The uArm operates fine unless started in that position. I’ll be testing today and will see what the joint angle and position query commands report in various positions.
We think the the cable from the control board to the left/right motors may have a bad connection while the uArm is on some special position that cause the control board failed to get the right motor angle on that position, then caused the unnormal motion.