I started recieving this error on the xArm 5 today. This did sit in storage for an extended time but worked fine when we pulled it out and began using it.
The software is:
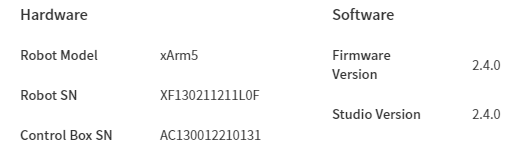
FW version 2.0.1
Studio Version 2.0.3.
Would you please share the SN of the xArm to support@ufactory.cc?
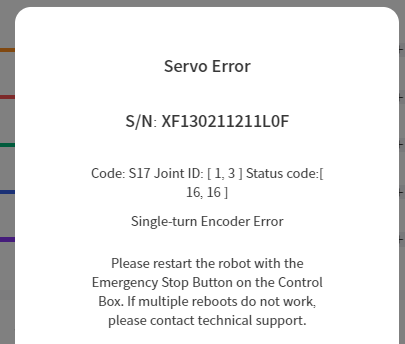
Can you take a screenshot of the error code? There should be a status code, we need it to troubleshoot the problem, thanks.
Minna,
I am seeing the error on Joint 1 and 3 this morning. Resetting resolved joint 3 but joint 1 remains issue still exists.
The status code after the reset remains Status code:[16]
Please follow the below steps to clear this error S17 error with status code 16.
press down E-stop button and then release
enter into ‘Settings-General-Debugging Tools-Joint’, send ‘H101 D0104 V1 I*’ to unlock joint*, manually move joint* a little bit, and then send ‘H101D0813V2I*’, press down E-stop button. (This step will reset the zero position, so you need to mark the original position of J* before moving)
release the E-stop button, move Joint* to the original position, send ‘D13 I*’, press down E-stop button.
Try to enable the robot again.
stands for Joint id, It can be 1-7, form your picture, you need to do the same steps for joint1 and joint3.
Minna,
Thanks for the instructions on clearing the error. Everything is now working.
Just curious what does the command H101D0813V2I* do? I would like to document the fix in our local instructions so our technicians will understand the procedure.