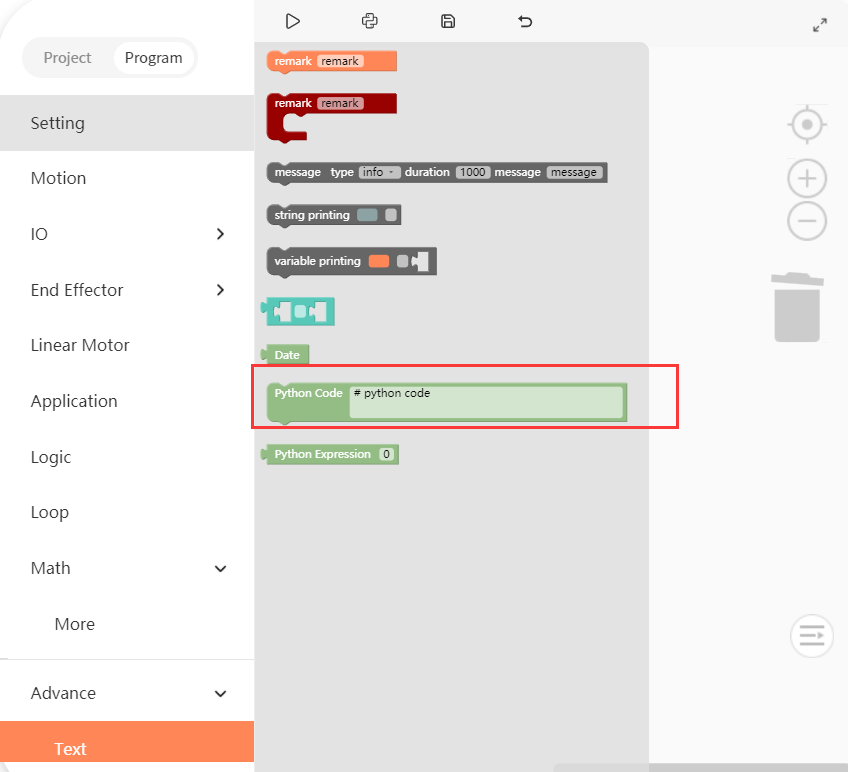
The Blockly module contains a ‘python code’ block, which you can insert your python code to communicate with RS485 end-effector.
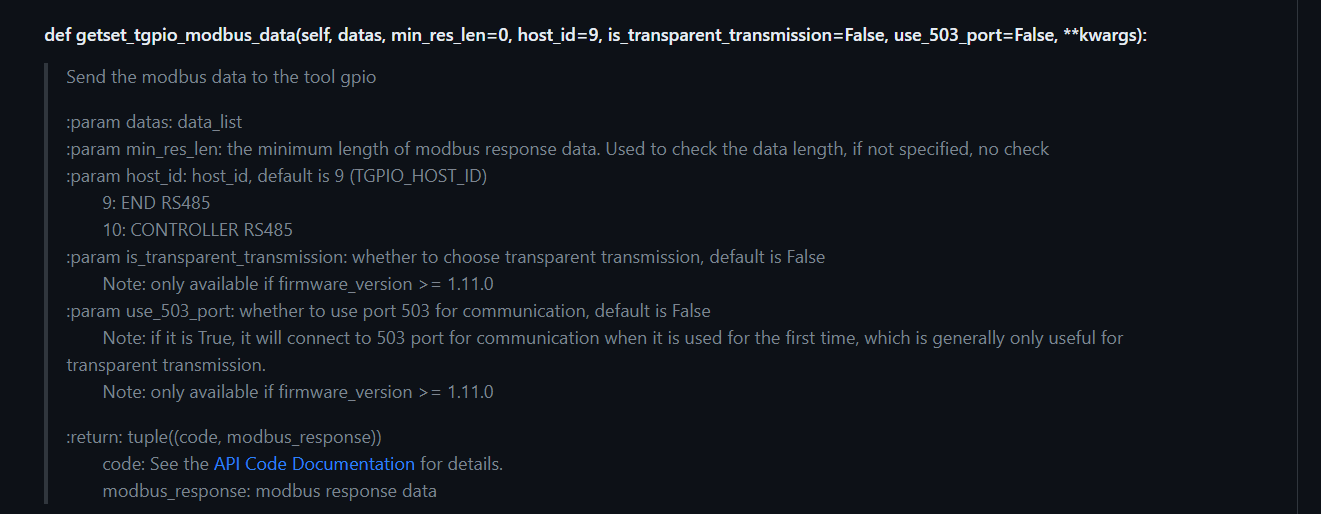
We provide getset_tgpio_modbus_data to send the command, for more details please refer to the user manual Chapter 1.4.2.3 Modbus RTU part. Lite 6 - Google ドライブ
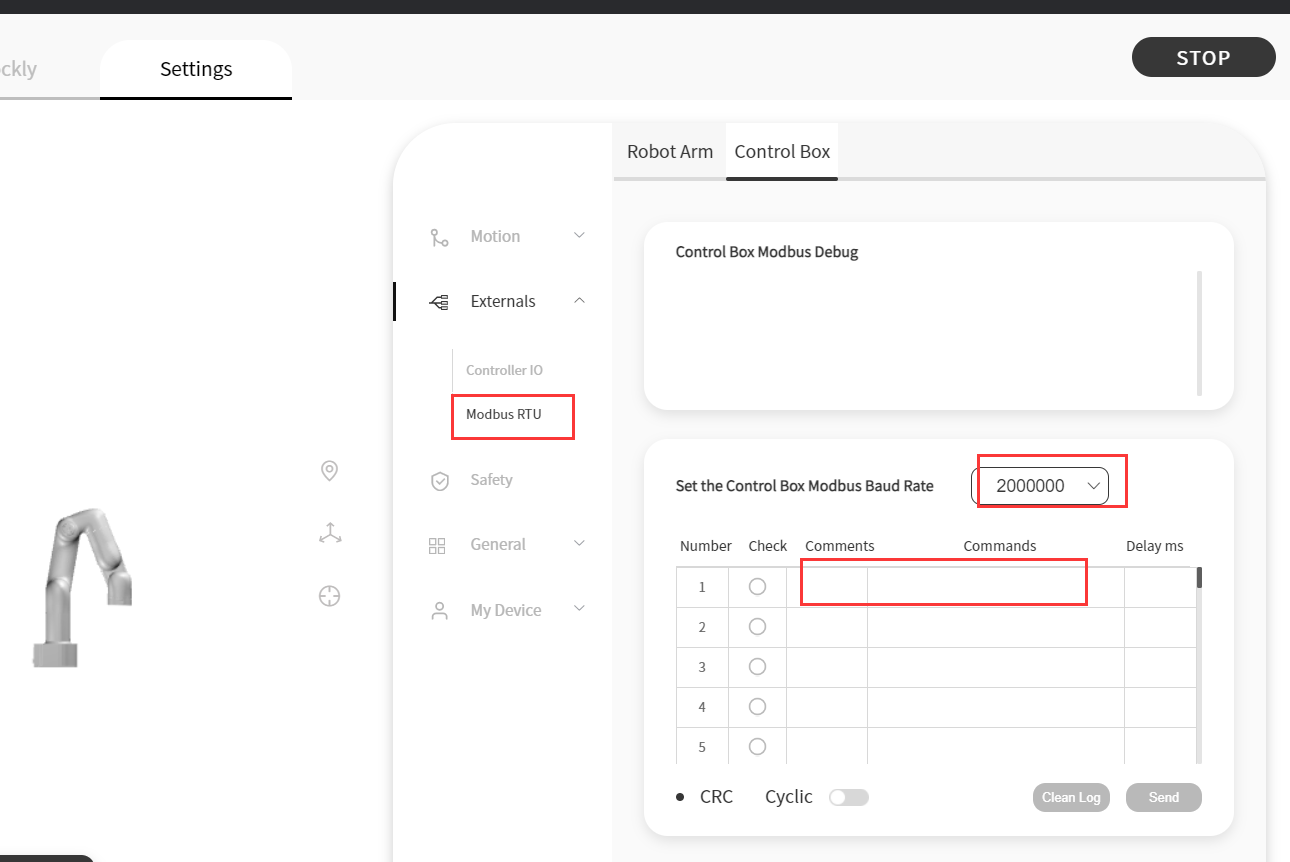
If the end-effector supports standard Modbus RTU, you can debug it on ‘Settings-Externals-Modbus RTU’, please note that the baud rate of our robot’s end should be the same as the end-effector.