- 下载一个Pycharm: Download PyCharm: The Python IDE for data science and web development by JetBrains
- 安装 Pycharm.
- 安装xarm-python-sdk
xarm-python-sdk有多种安装方式,使用pip 从Pypi安装,使用git clone指令获取源代码后安装,或者从Github下载源代码安装。
- 使用pip 指令安装
pip install xarm-python-sdk
- 使用git clone指令获取源代码后安装
git clone https://github.com/xArm-Developer/xArm-Python-SDK.git
python setup.py install
- 从Github下载源代码安装
下载xArm Python SDK: GitHub - xArm-Developer/xArm-Python-SDK: Python SDK for UFACTORY robots, 850, xArm5/6/7, and Lite6.
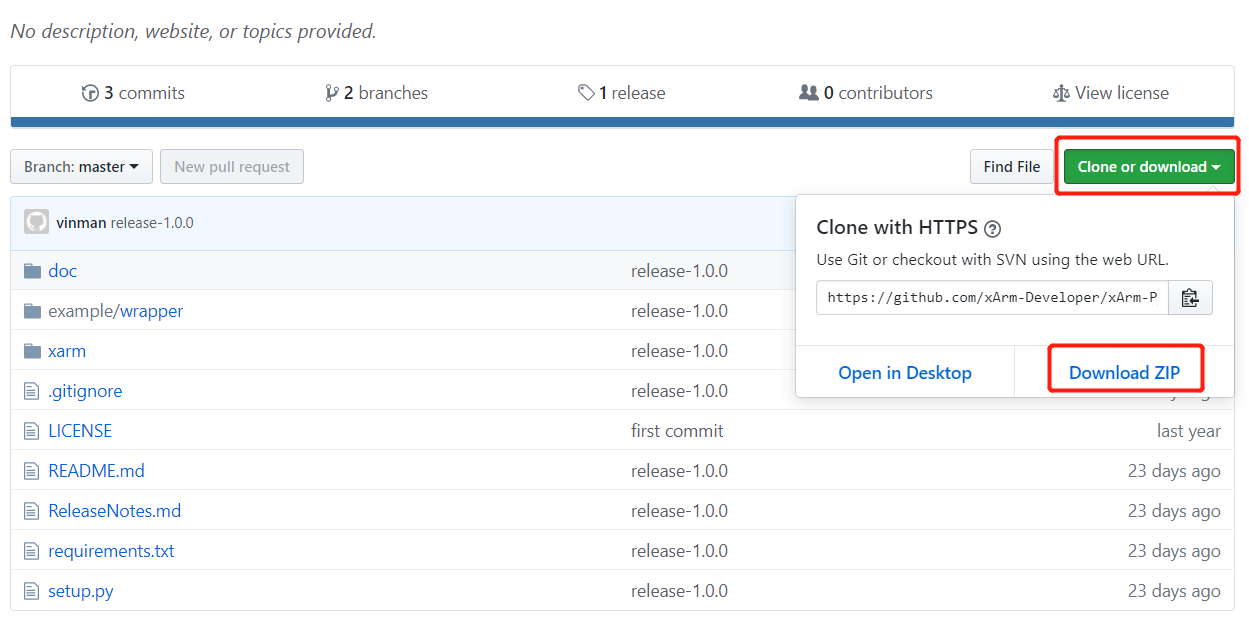
解压 “xArm-Python-SDK-master.zip”.
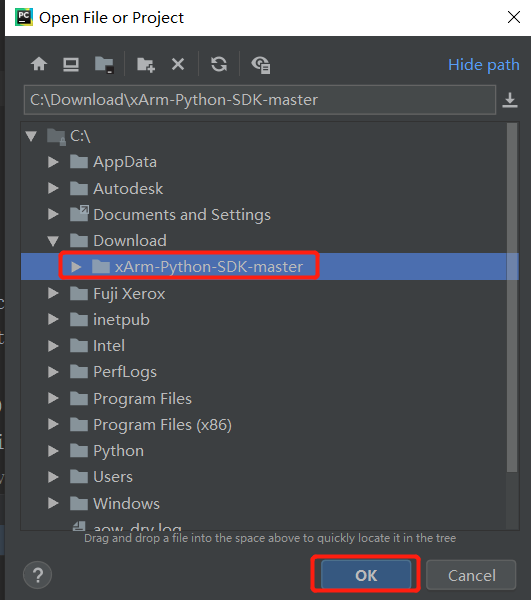
4.运行Pycharm, 点击"File"-“Open”
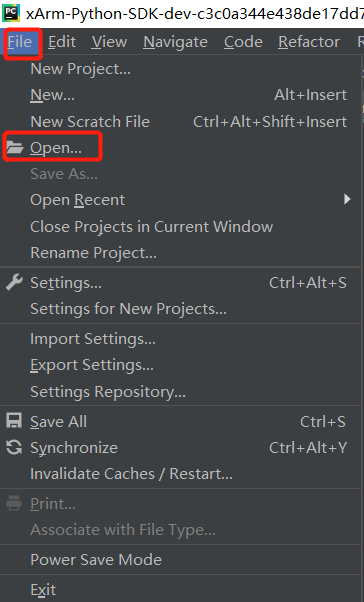
5.选择 “xArm-Python-SDK-master” ,点击 “OK”.
-
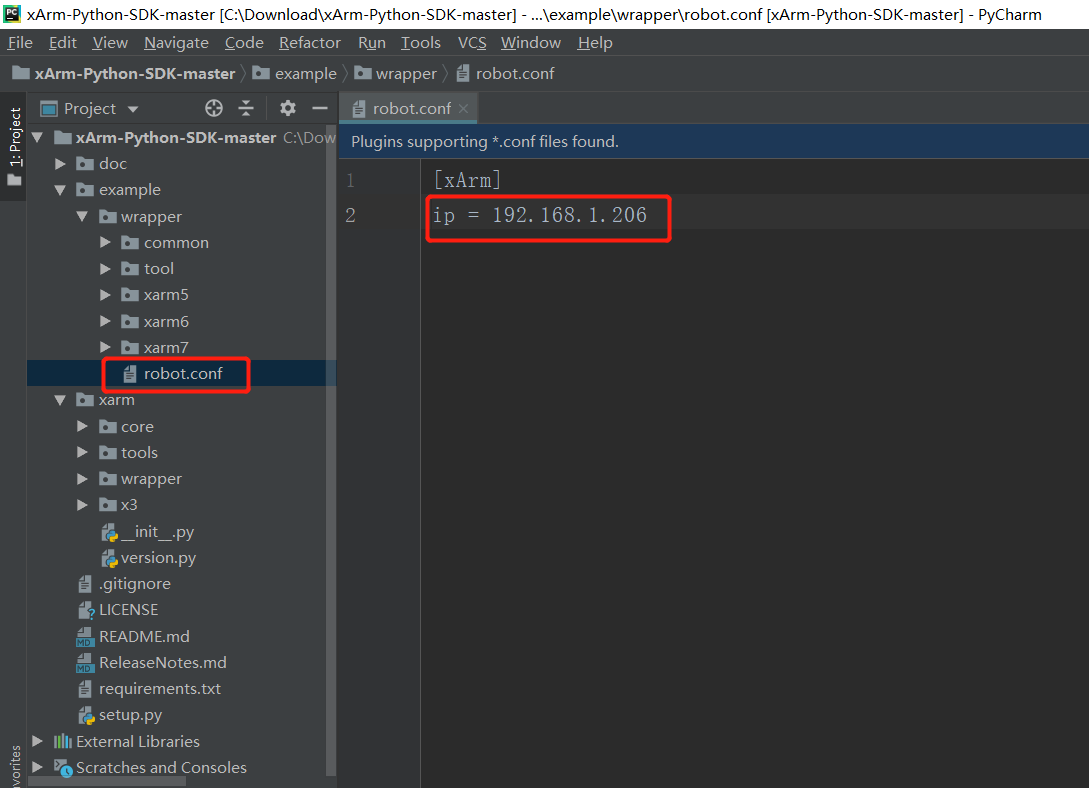
配置控制器IP
点开文件夹,找到 “robot.conf”,将IP地址改为你的xArm控制器的 IP 地址.
-
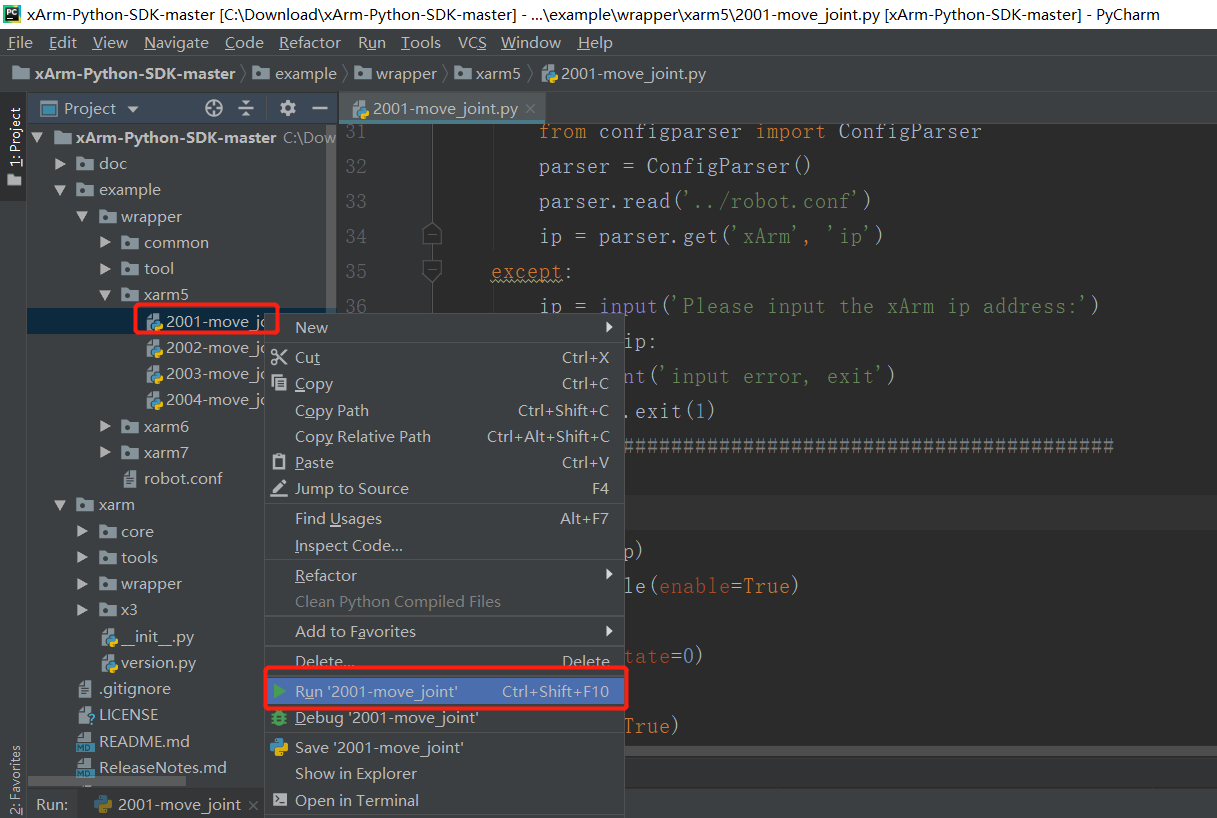
运行一个SDK内置的实例.( 注意: 运行前请确保xArm已经连接好,并且周围满足xArm机械臂安全运行的条件。)