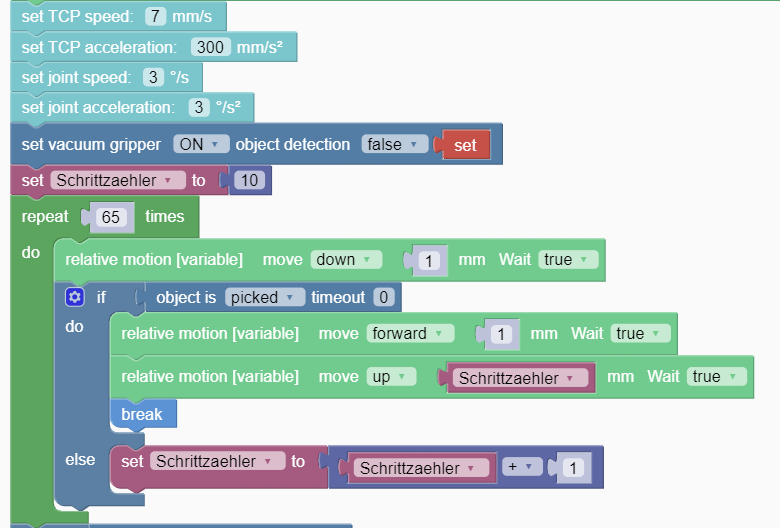
I tried your Blockly project on my side, it looks working fine. If something is picked up, the arm will move to the defined position immediately. And it seems the variable ‘schrittzaehler’ is useless in this case?
Do you mean it will keep moving downwards to 65mm even if something is picked up on your side?
What is the firmware and ufactory Studio vesrion? I did the test on the latest V2.3.0 version.
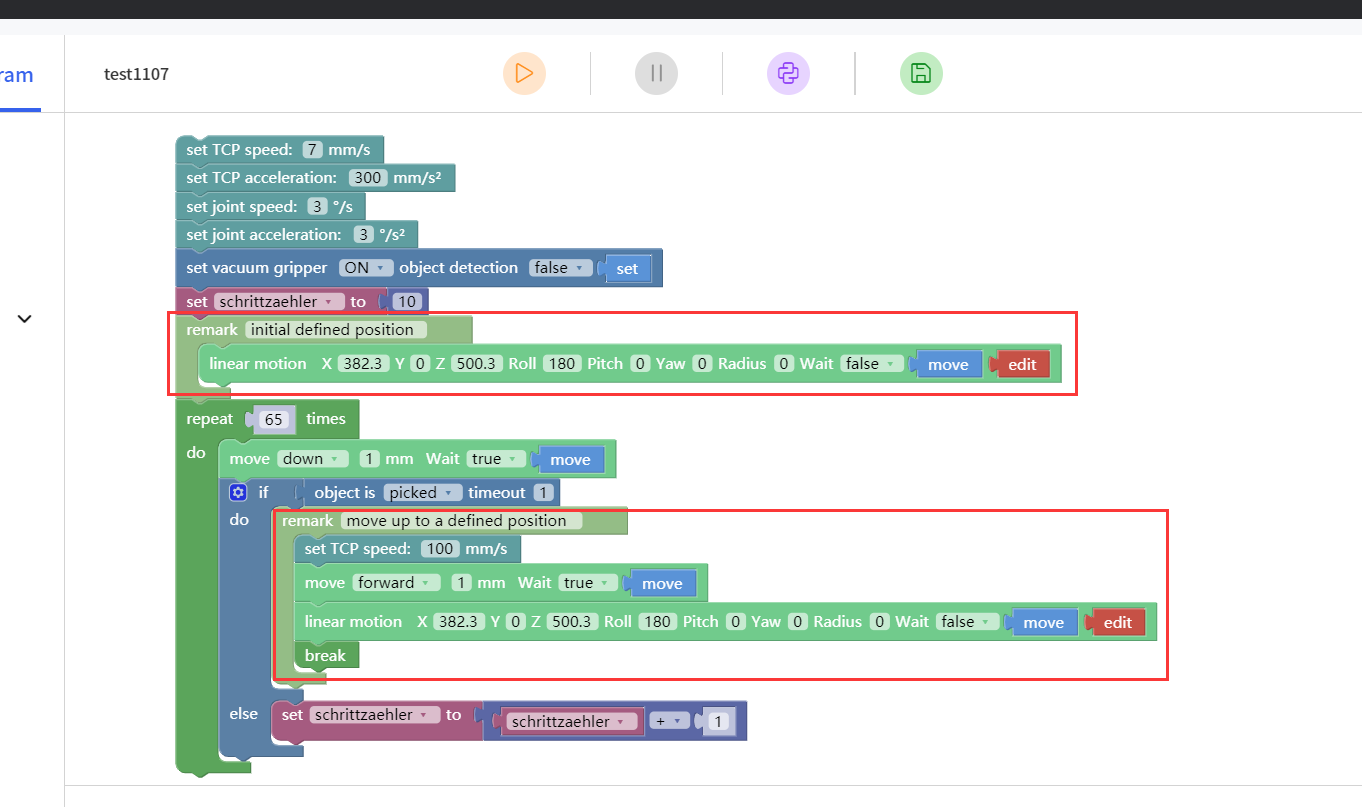
thank you for testing. I just saw, i made a mistake in my example.
Please look at the new Picture i added. This would be the statement, we would like to use.
The If Clause for object is picked up with the timeout is working properly, but the original “move down 50mm wait=false” does not get stopped when we want to order the command to move back to original position once something has been picked up. It just keeps moving down even if something was picked up.
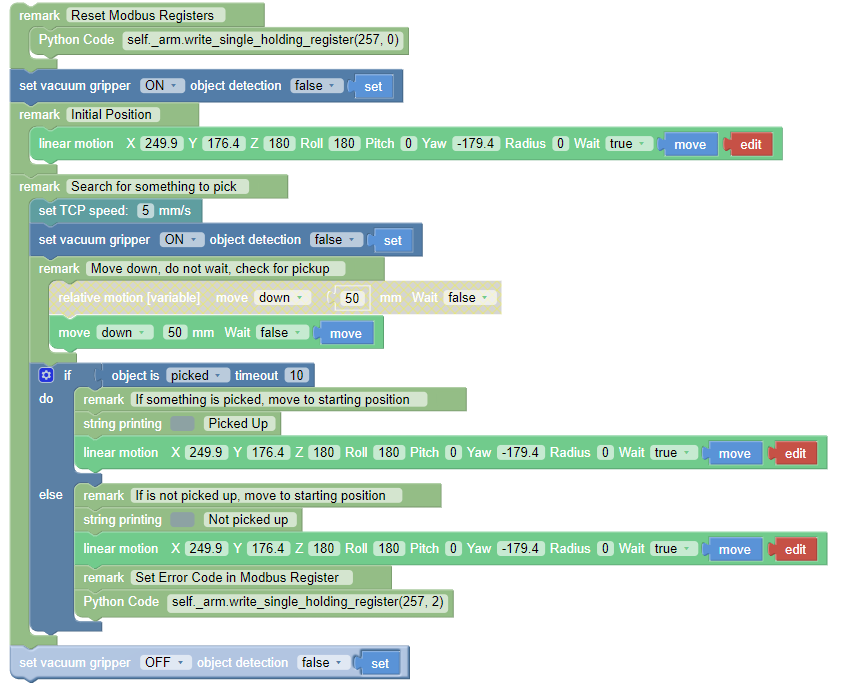
The COmmand motion(stop) quits the whole blockly task, so we cannot queue more commands.
Please note that the state of our Blockly is bound to the state of the robot arm. Once the state of the arm is set to 4, the Blockly program will exits as well.
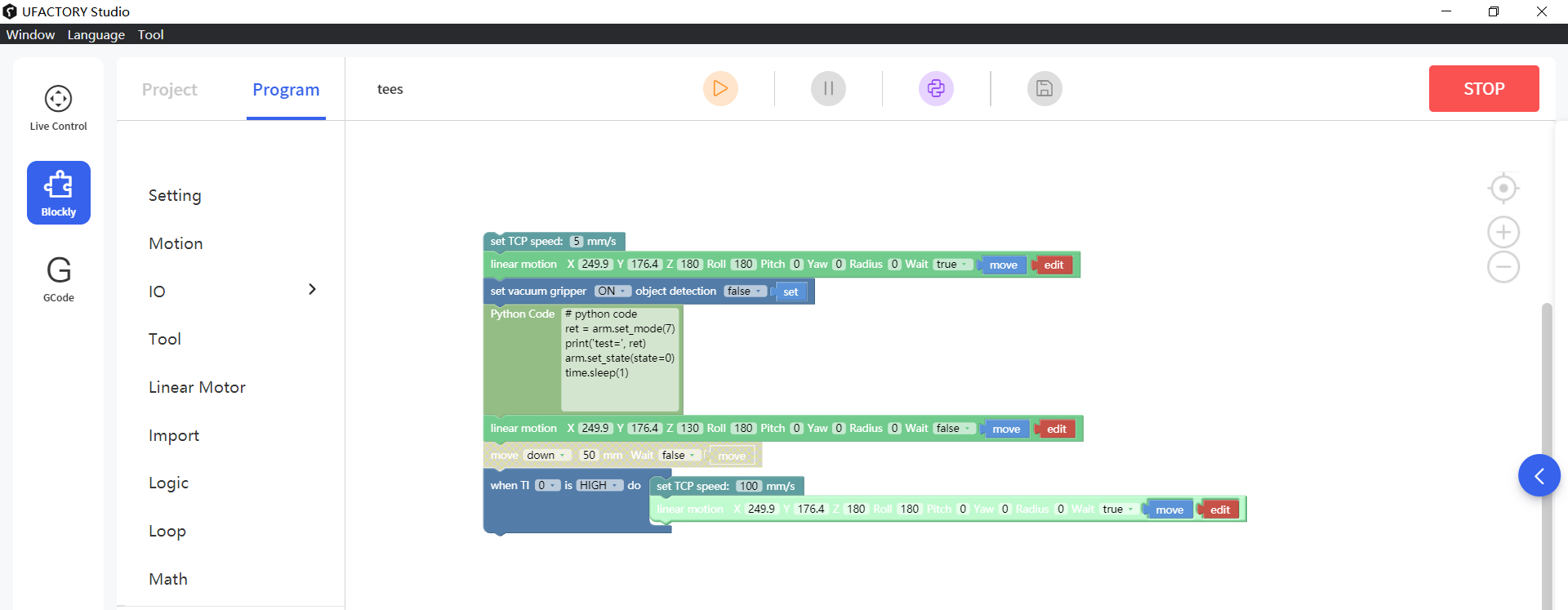
If you want to interrupt the current movement, you can use mode 6/7 -online trajectory planning mode.
Below is a simple demo for your reference.
I was having the exact same issue - thanks for the solution! It would be great to add this functionality natively into Blockly without having to use a (currently undocumented) Python call. Things like tool zeroing and calibration rely on this kind of function frequently.