I have been reading back coordinates using pyuarm (although I doubt its a python issue) and am using the latest firmware.
Please the the Attached Image (Top down view of the uarm).
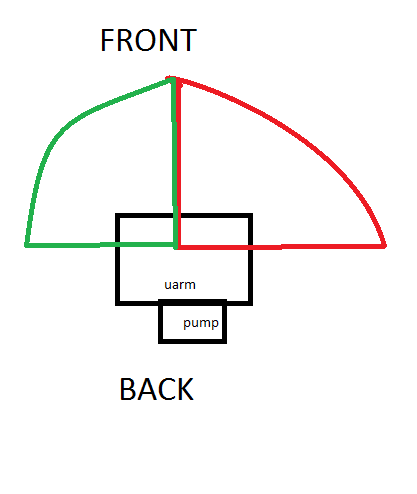
When I am reading back coordinates using the pyuarm library, the Y values are always 0.0 when the arm is in the Red zone (Arm moving from 0 degrees to 90 degrees to the left (when you are facing the front of the unit)) .
However the values for the Y change from 0.0 to around 145.0 when I move the arm in the green zone (Arm moving 0 to 90 Degrees Right (when facing the front of the unit)).
Is there a reason why the Arm isn’t reporting Y-Axis values when moving on the Left side of the X-Axis?
for example:
get_position()
returns (25,0.0 , 145.74)
Also I have replaced the Left servo (when views from the front) and ran the calibration tool after It was replaced. Not sure if this could be why as well? (Ive also shown that in the picture below)