I had the robot do a circular movement using the circle command in blocky. During the movement the J4 exceeded the maximum movement and errored out. Now joint 4 errors out when I use it but if I put it in manual mode it moves fine. I reset the robot to factory setting but still the same problem.
Hi Bostik,
Please share the SN of your robot to support@ufactory.cc.
What is the TCP payload? Did you set it correctly? What is the error code? Please more details.
Please share your Blockly project as well, thank you.
Best regards,
Minna
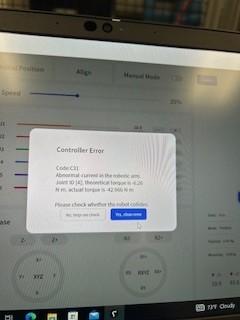
2.4 kg is the payload, for troubleshooting purposed I removed the payload and selected “no end effector” I reset the settings to “factory settings” I loaded the most current software and firmware updates. the controller error is C31 Joint 4 is the only joint I’m have an issue with, I reduced the sensitivity to 1 and if I run slow, 9% speed I can move the Joint from 360 to -360 but it will not go from -360 to 360 without getting an error. Robot SN FX851001A42B07,
Hi Bostik,
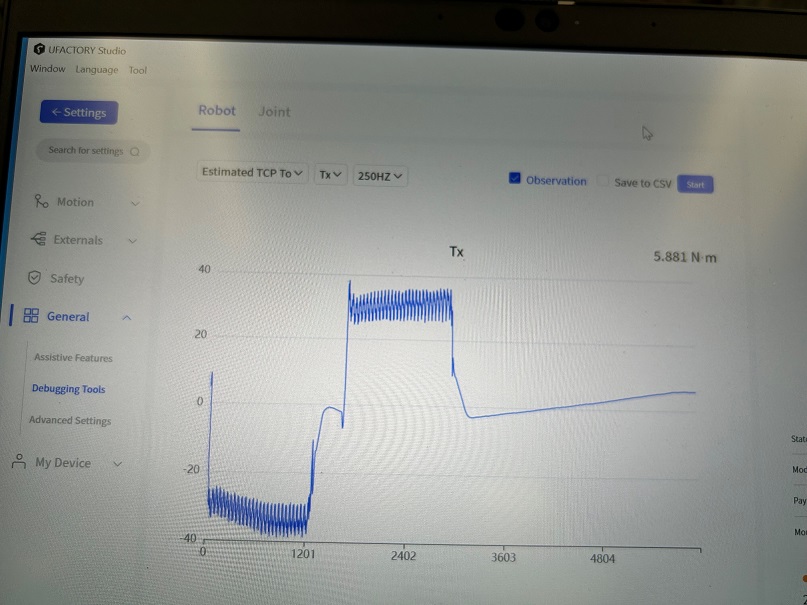
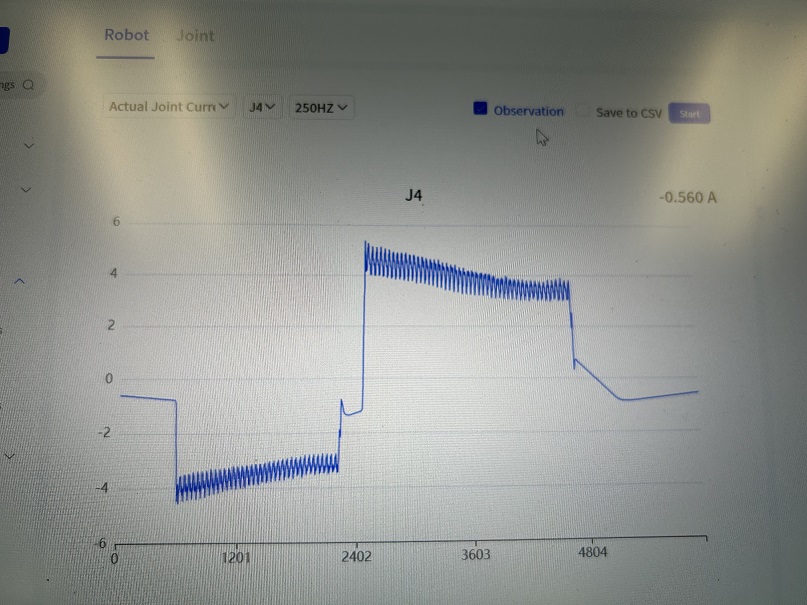
Please remove all end effector, move the arm to initial position, enter ‘Settings-General-Debugging Tools-Robot’, choose ‘actual joint currents-J4-250HZ’, click ‘observation’, click ‘start’, after 30seconds, click ‘end’ and take a screenshot of the result to me.
Please enter ‘Advanced Settings’, disable ‘collision detection’ and save, then try to move J4 and see if there is still an error.
Best regards,
Minna
The error goes away when I disable collision detection and the joint appears to work fine, no motors noises. I recorded the joint current going both forward and backwards with no load.
Hi Bostik,
What are the TCP coordinates of the arm when you record the current of J4?
I think we need a quick video call to troubleshoot it, please send an email to support@ufactory.cc, we will arrange the meeting, thank you.
Best regards,
Minna