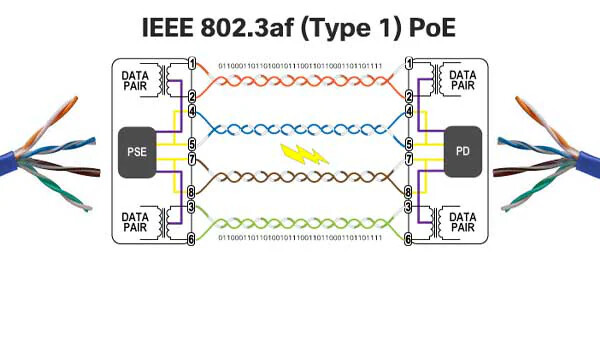
After reading the UF850 manual, I realized that the Ethernet connector on the end effector uses only 4 cables, meaning it cannot support PoE devices, which require all 8 cables. What led to this design decision?
I also noticed a user discussing the use of a PoE Ethernet camera in this forum, which suggests that PoE is a common requirement.
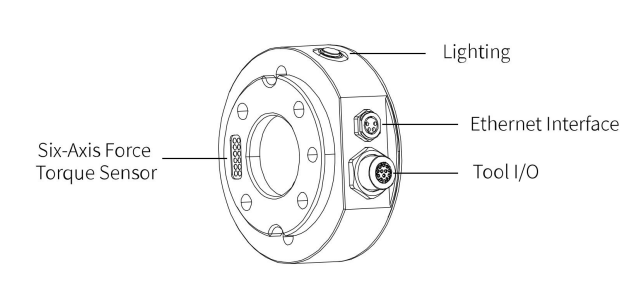
According to this, users are always required to use the Tool I/O connector to power anything connected to the end effector, which means two cables are necessary if you want to use the Ethernet interface. Are you planning to upgrade this?
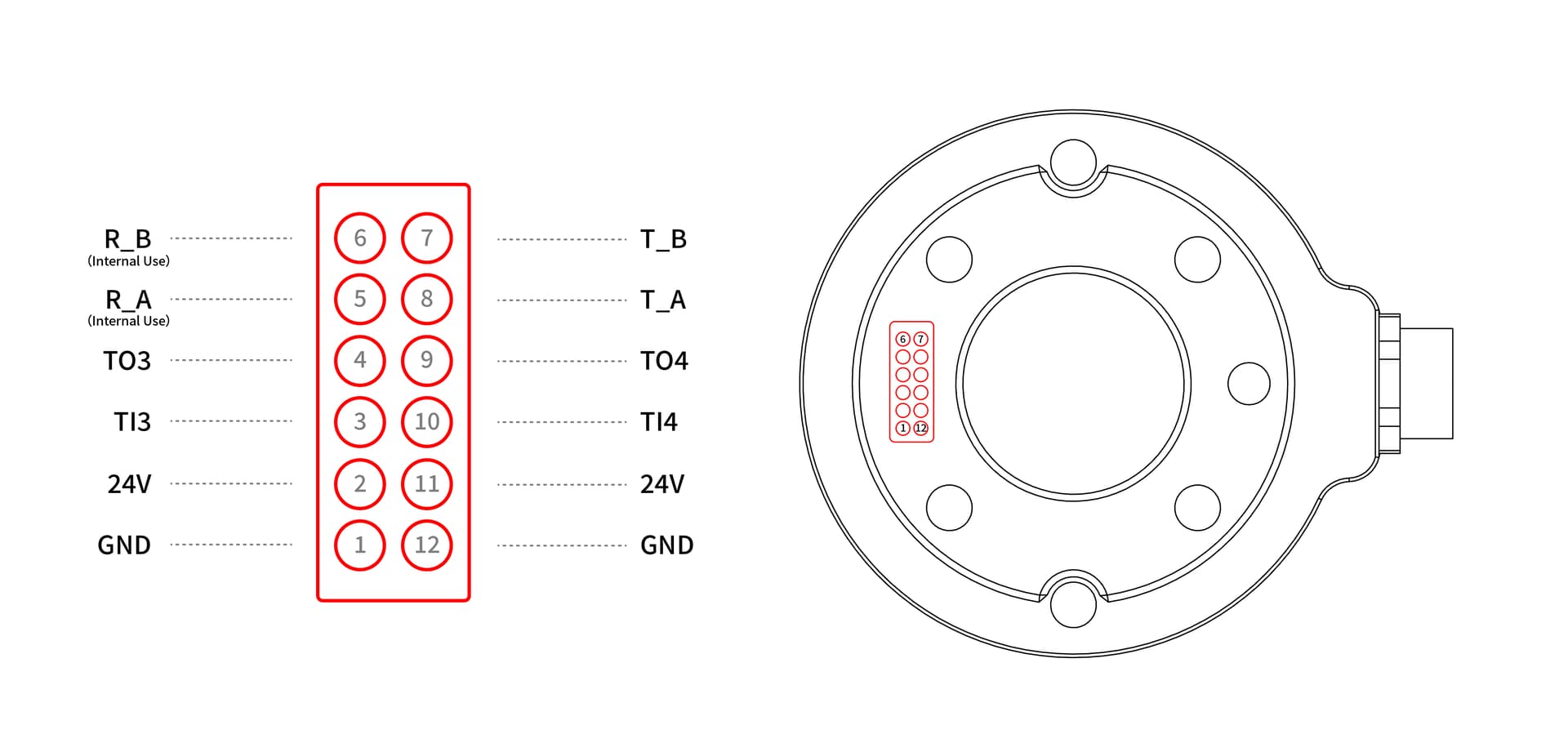
There is also the Six-Axis Force Torque Sensor connector that might serve the purpose, but I’m not sure if it is available for user access, as I couldn’t find documentation about it in the manual. What I do know is that it is not limited to the Torque Sensor; it appears to also be used in the Vacuum Gripper. Could you provide more information about this pogo pin connector?
We have just created an 8-pin Ethernet cable version of the 850 prototype, which will be used to connect a PoE Gigabit camera for developing robotic vision-based picking. Replacing the 4-pin cable with an 8-pin one makes assembly more challenging due to the increased cable diameter.
If you could share more details about your project, that would be great. Feel free to discuss it with me via email at daniel.wang@ufactory.cc.
Hi,
The 4 pin cable in the 850 robot can not be used as USB or it will unstable.
What’s the end effector? Could you share us more details about your project? Feel free to discuss it with me via email at daniel.wang@ufactory.cc.