Hi,
I have a big problem, I hope you can solve it.
When I open xarm studio the robot state reads ‘stop’
After a crash when positioning I restarted the robot, you here the noise of motors so
everything looks normal.
Now the robot state reads ‘pause’
If I click on any of the buttons to move nothing hapens.
If I press ‘zero position’ the arm moves just a few millimeters.
The following comes out the python diagnostic program,
version_number: 1.6.1
get_err_warn_code, ret=(0, [0, 0])
************* GetServoDebugMsg, Status: 0 **************
- Servo-1, Status: 0, Code: 0, Info: Normal
- Servo-2, Status: 0, Code: 0, Info: Normal
- Servo-3, Status: 0, Code: 0, Info: Normal
- Servo-4, Status: 0, Code: 0, Info: Normal
- Servo-5, Status: 0, Code: 0, Info: Normal
- Servo-6, Status: 0, Code: 0, Info: Normal
- Servo-7, Status: 0, Code: 0, Info: Normal
- Gripper, Status: 0, Code: 0, Info: Normal
[clean_error], xArm is not ready to move
[motion_enable], xArm is not ready to move
[set_state], xArm is ready to move
get_state(): (0, 3)
get_err_warn_code(): (0, [0, 0])
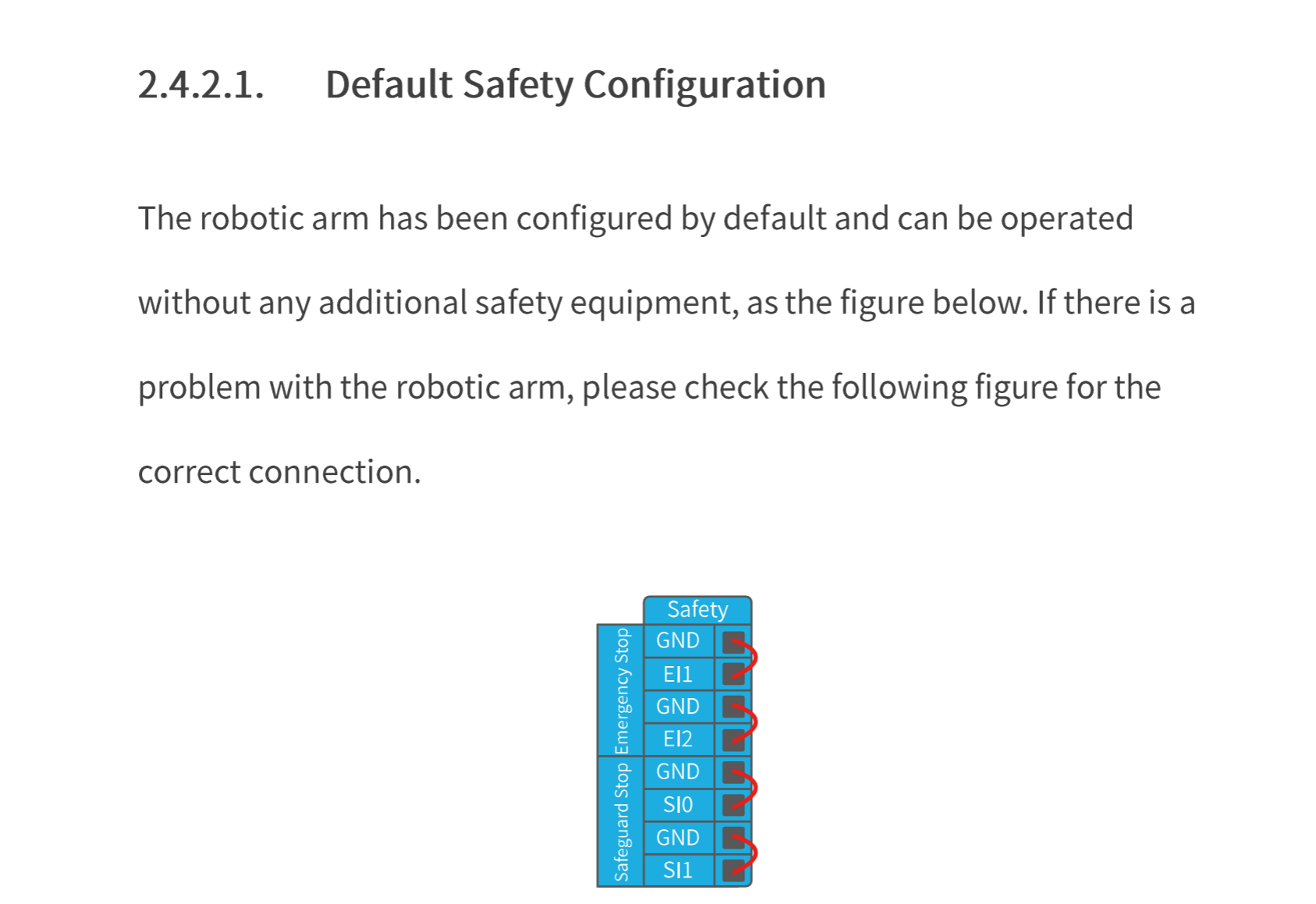
It looks like the xarm is in stop mode, I checked all my wiring but this looks fine.
Can you help me futher to find the issue?
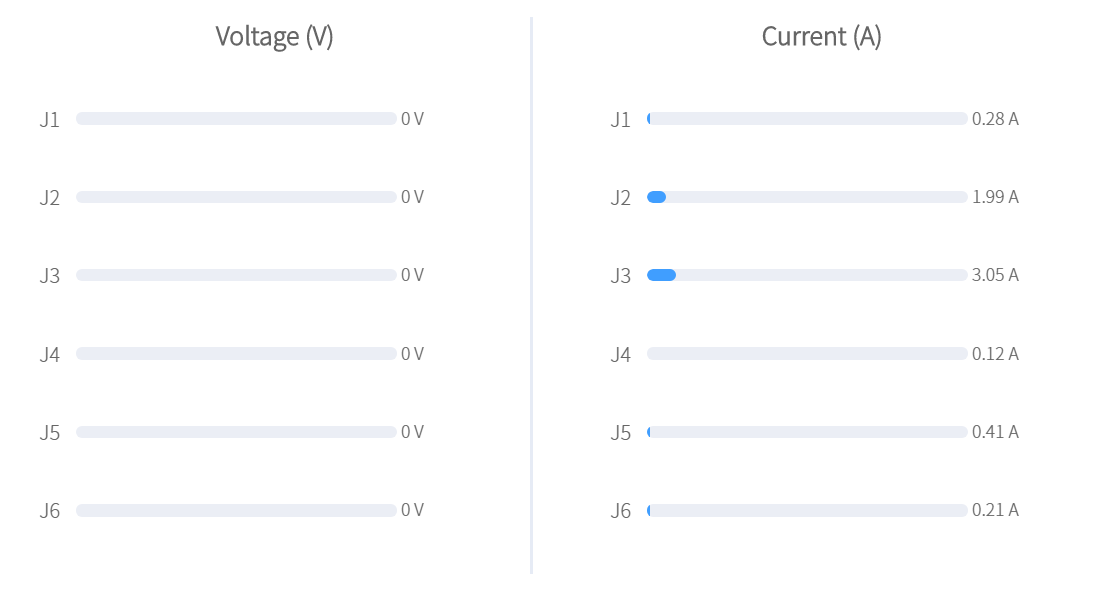
All servos at 0V ? is this ok
All servos has current
Thanks,
Danny