I am using a xarm6. When trying to enable the robot using the Studio I getting the error S18. Tried clearing the error from Advanced Tools → Clear Multiturn Error. That is not working. Also restarted the controller multiple times. That didn’t help either.
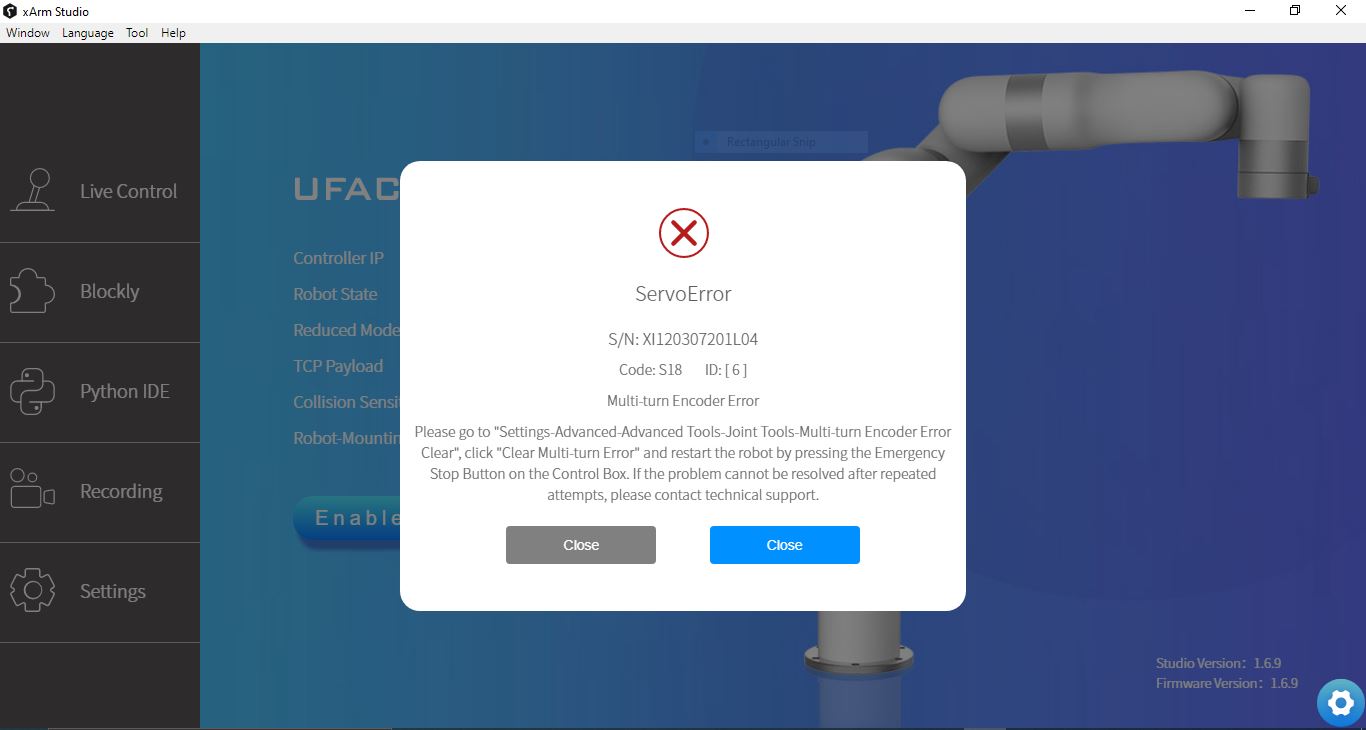
I checked the log terminal within “joint debug” (using xarm studio 1.6.9) and found the following message which shows servo 6 is having the encoder error.

As instructed I used the debug tool to send D11 and the response was
[D11]
code: 0
data: [0,0,0,0,0,18]
After using the clear multiturn error D11 returns
[D11]
code: 0
data: [0,0,0,0,0,0]
Next, when I try to enable the arm the same error occurs.
Is there any other way I can fix the issue?