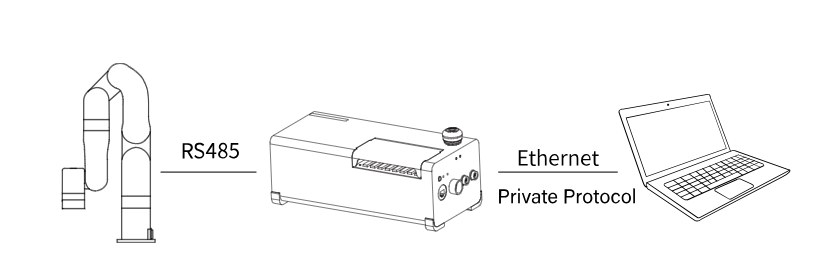
I have been using Ethernet cable to connect and control Xarm controller and PC but now I want to use the RS485 port to control the Xarm robot through PC via RS485. Can I do that?
1 Like
Hi Kamesh,
The communication method between the controller and our arm is RS485, but between the controller and the host(PC) is ethernet, can’t go through via RS485.
What is your application? What protocols does your device support? Does it support Modbus TCP?
Best regards,
Minna
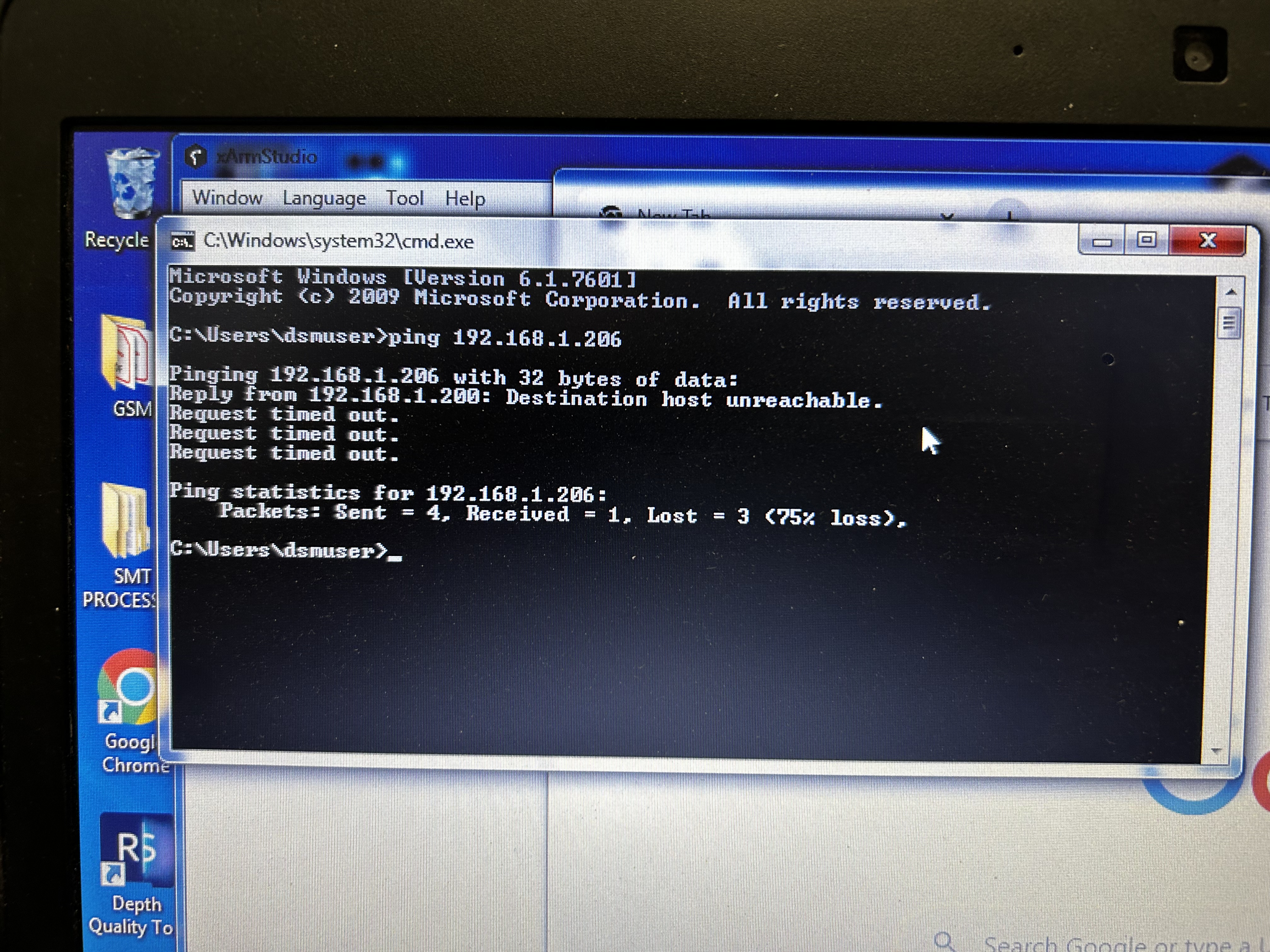
I have already messaged and emailed you regarding the problem of connecting controller and Pc as it stopped working since last Thursday. The Xarm studio shows server not ready error and I don’t know how to fix the problem as you guys are not responding on emails. @Minna the email has Zoe , Lancer and Daniel as well but no reply since last two days.
Hi Kamesh,
Would you please double check the email and intercom? We responded to you in the past two days.
At first, we asked for the basic inormation of the controller to position the problem, today we think there is a problem of the USB flash drive of the controller box.
Please try to buy a new USB drive and flash the image file according to the instructions on inercom, let me know the result.
Best regards,
Minna
Where to buy usb drive and what needs to be in the usb drive.
@Minna @admin @Daniel_Wang @lancer ok I got the email and instructions to change the USB disk but how can I check if the current USB drive/disk is good or not before I buy a new one as we are not still sure if this is the root cause or not.

Hi Kamesh,
Any USB with a size >=32GB should work, you can buy it locally or Amazon.
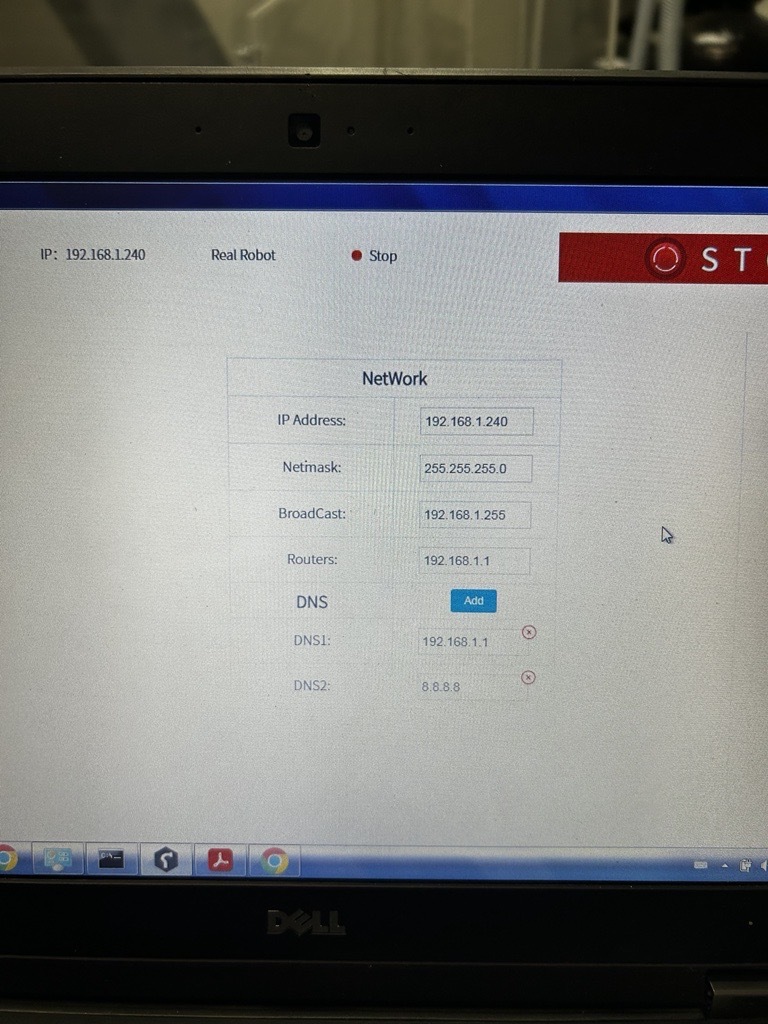
The IP is correct and the indicator of the controller are all normal. It is the problem of the USB in my experience, we can only confirm the problem after getting the controller, but the controller box is out of warranty, shipping it back to China is in high cost and waste time, that’s why we ask you to try a new USB first, hope it is clear for you.
If you want to send the control box back directly, we will help to arrange the pick up service at door.
Best regards,
Minna
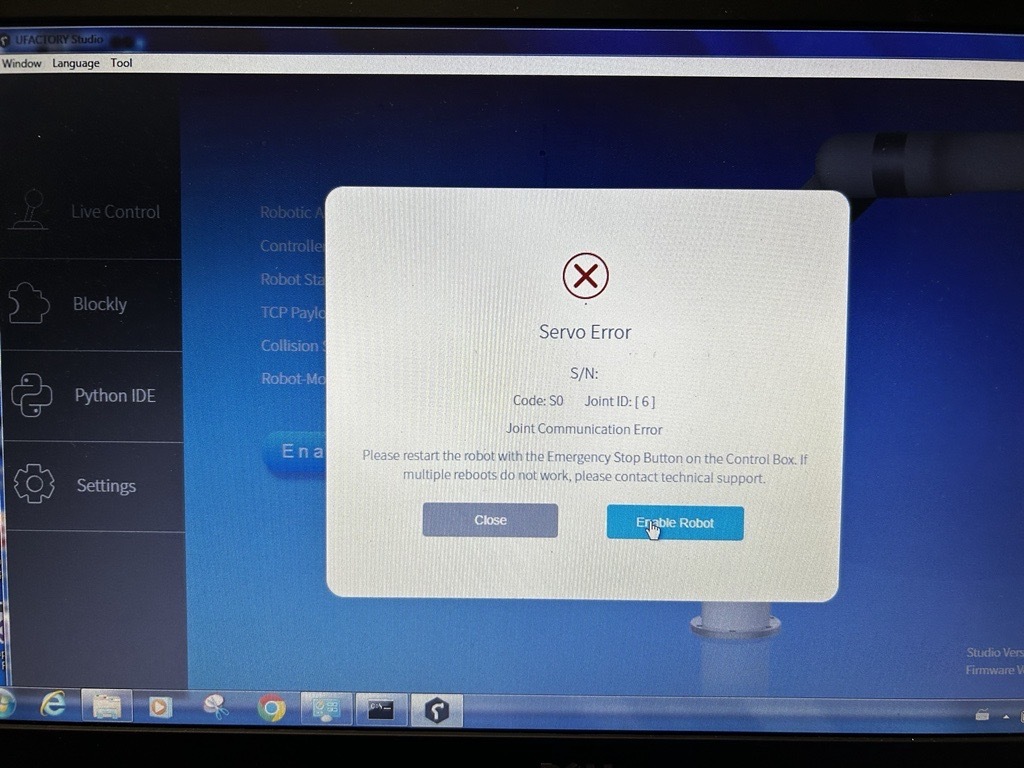
After buying and flshing new USb drive, we were able to connect to the robot arm but now it shows below mentioned servo error: -

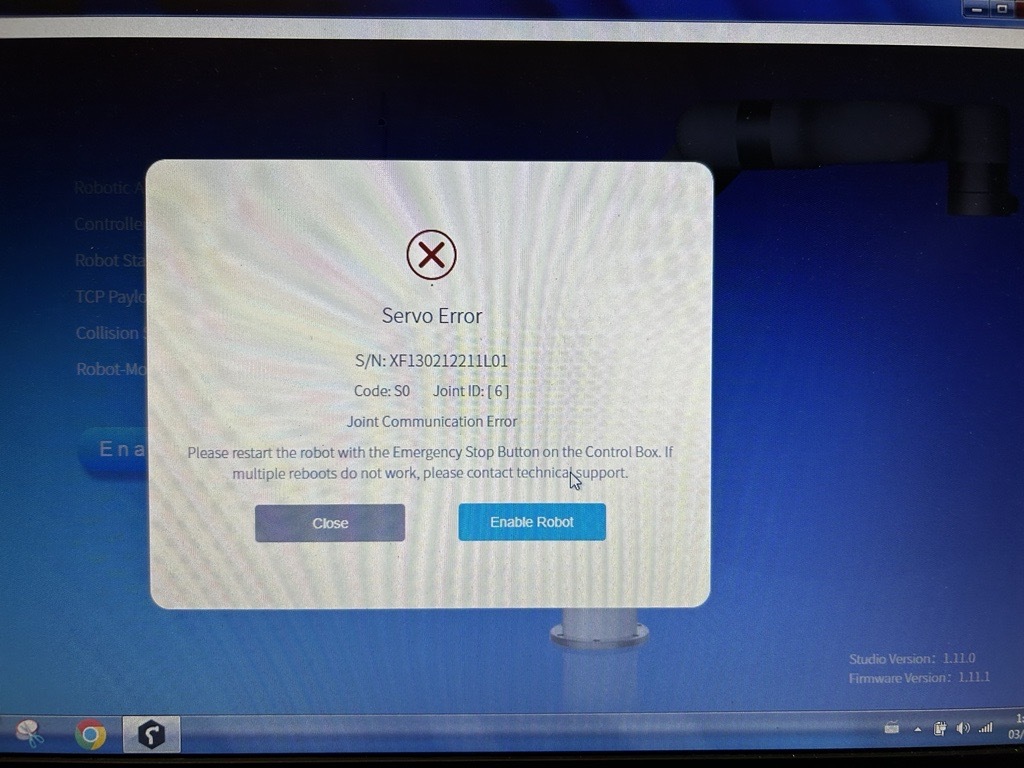
Hi Kamesh,
The image file is used for xArm6 by default, please follow the steps shared on the intercom to re-flash the firmware for xArm5, thank you.
Best regards,
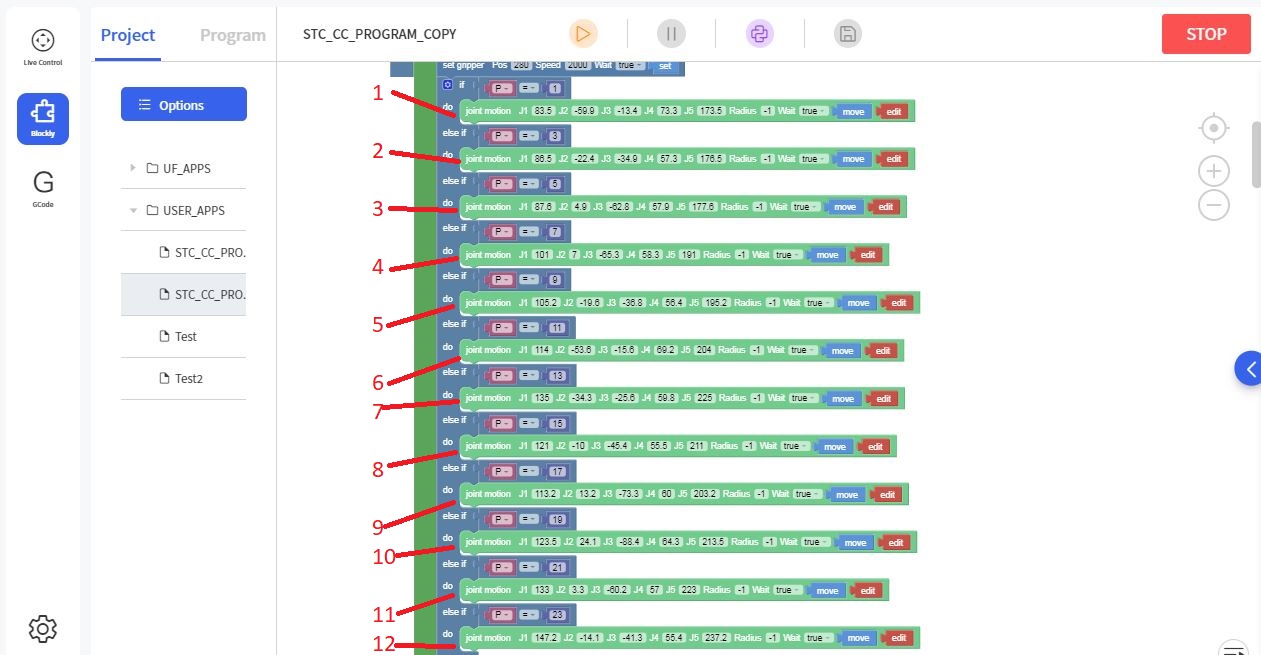
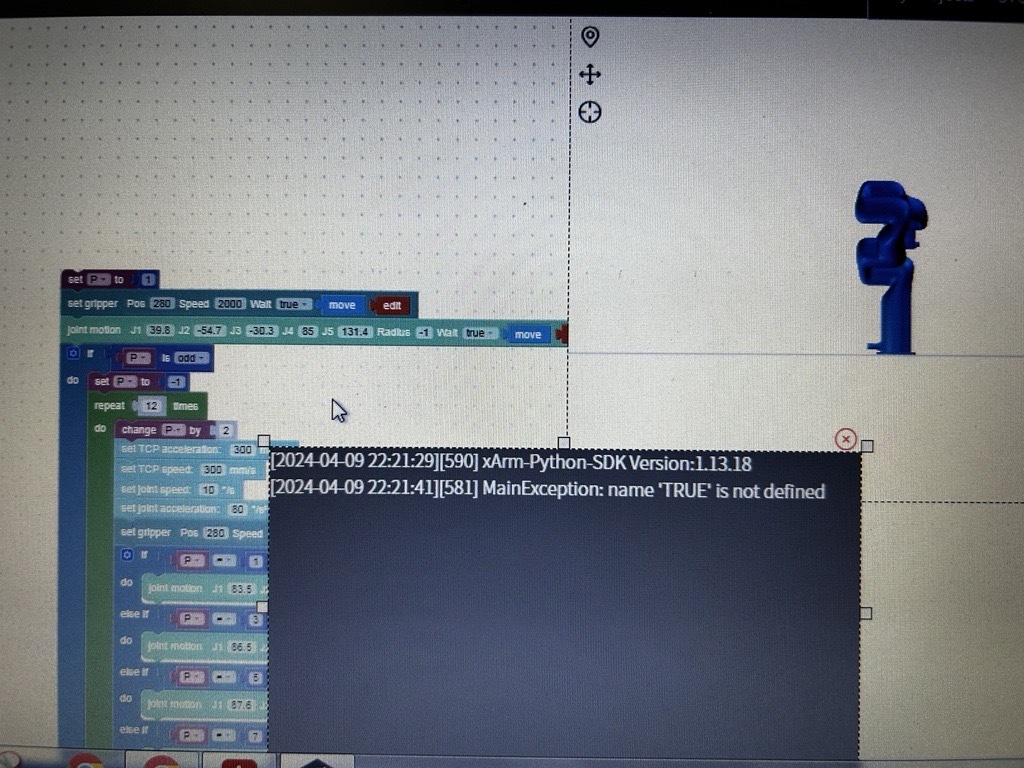
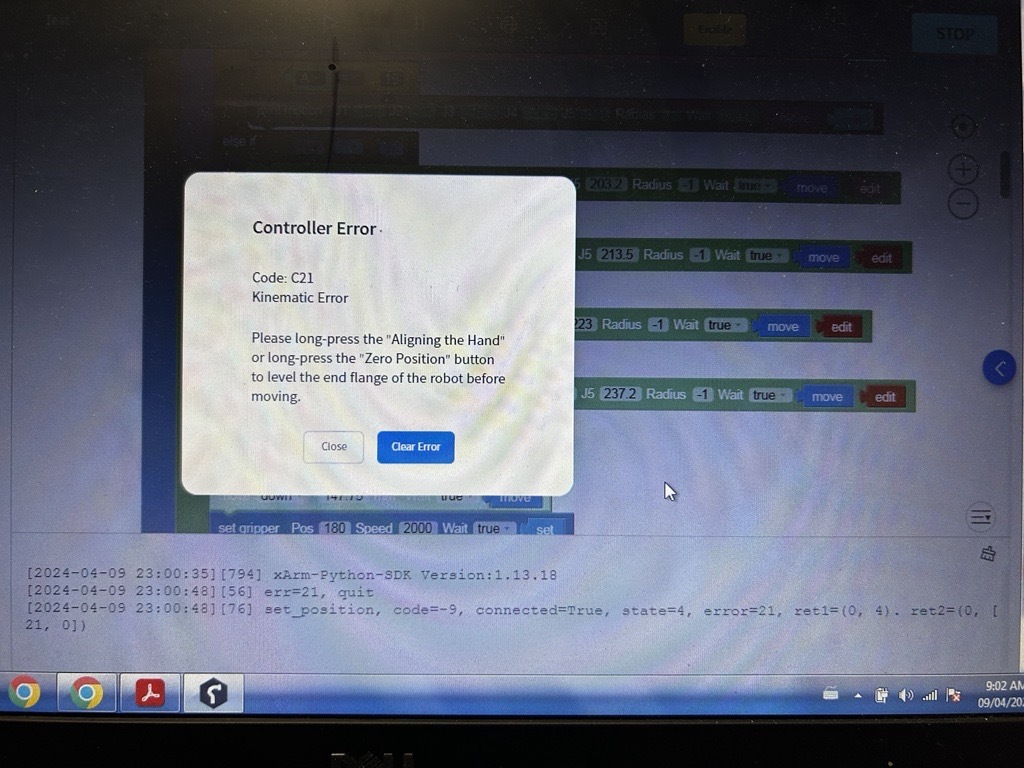
We updated the firmware and studio to the latest version but still the robot stops after reaching those points which are highlighted in the below image. It now shows “MainException: name “true” is not defined” in the popup window instead. This was after updating the controller robot studio version and when we updated the window’s robot studio version to the latest then it started to show the earlier error code of C1 Kinematic error for thos points.
The robot is showing code:21 kinematic error once it reach point #7,8,9 &11.
Please read image names for details.
Hi Kamesh,
Is it possible to have a quick video call to troubleshoot the problem? When is available for you?
I tried your project and it works fine on my side, please download the log via ‘Settings-My Device-Log’ and upload it to the Google link, download the configuration file via ‘Settings-General-Advanced Setting’ , and I will check.
Can you reach the point 7/8/9/11 by clicking the ‘move’ button on the Blockly?
Best regards,
Minna
Hi Minna,
I am available from 8 am to 4:30 pm MST and I will send you the required files. I have created a small program separately without any logic and functions of the original program to test those points but the robot reach that point and then when it suppose to go down movement, it shows the error code c21 kinematic error. Yes, the robot reach those points by move function but stops when running that simple program to reach that point and go down.
Hi Kamesh,
Thanks for the information and such details.
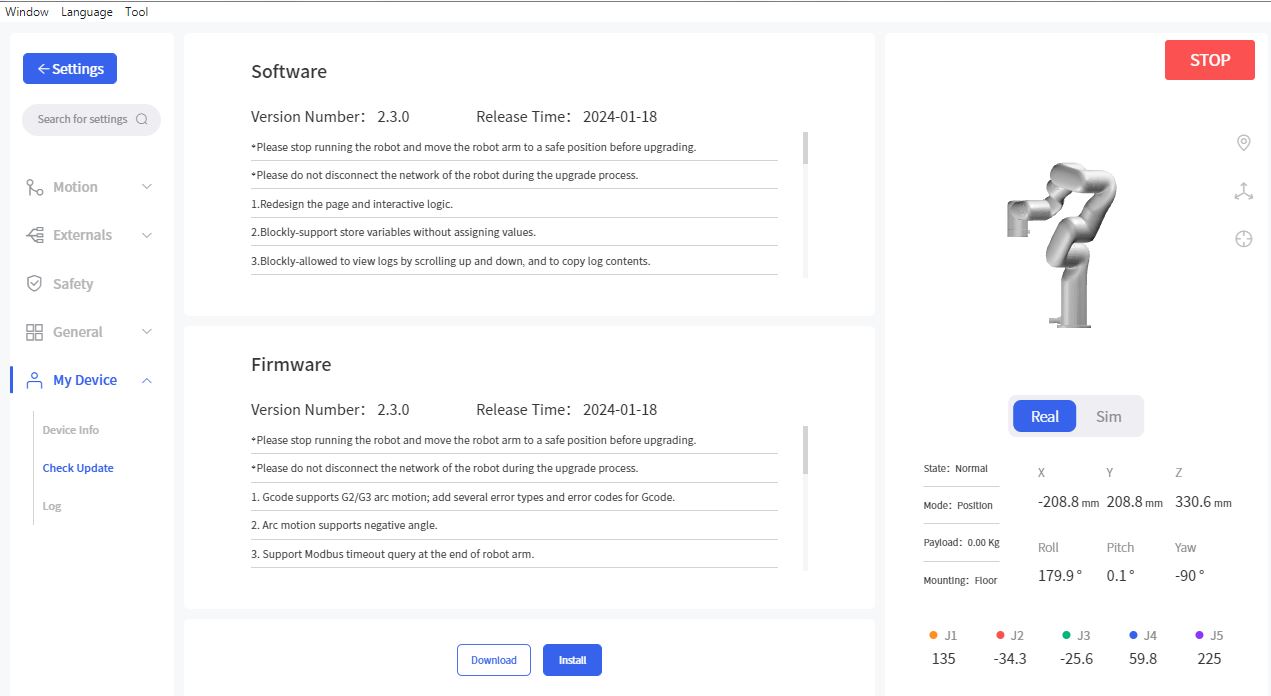
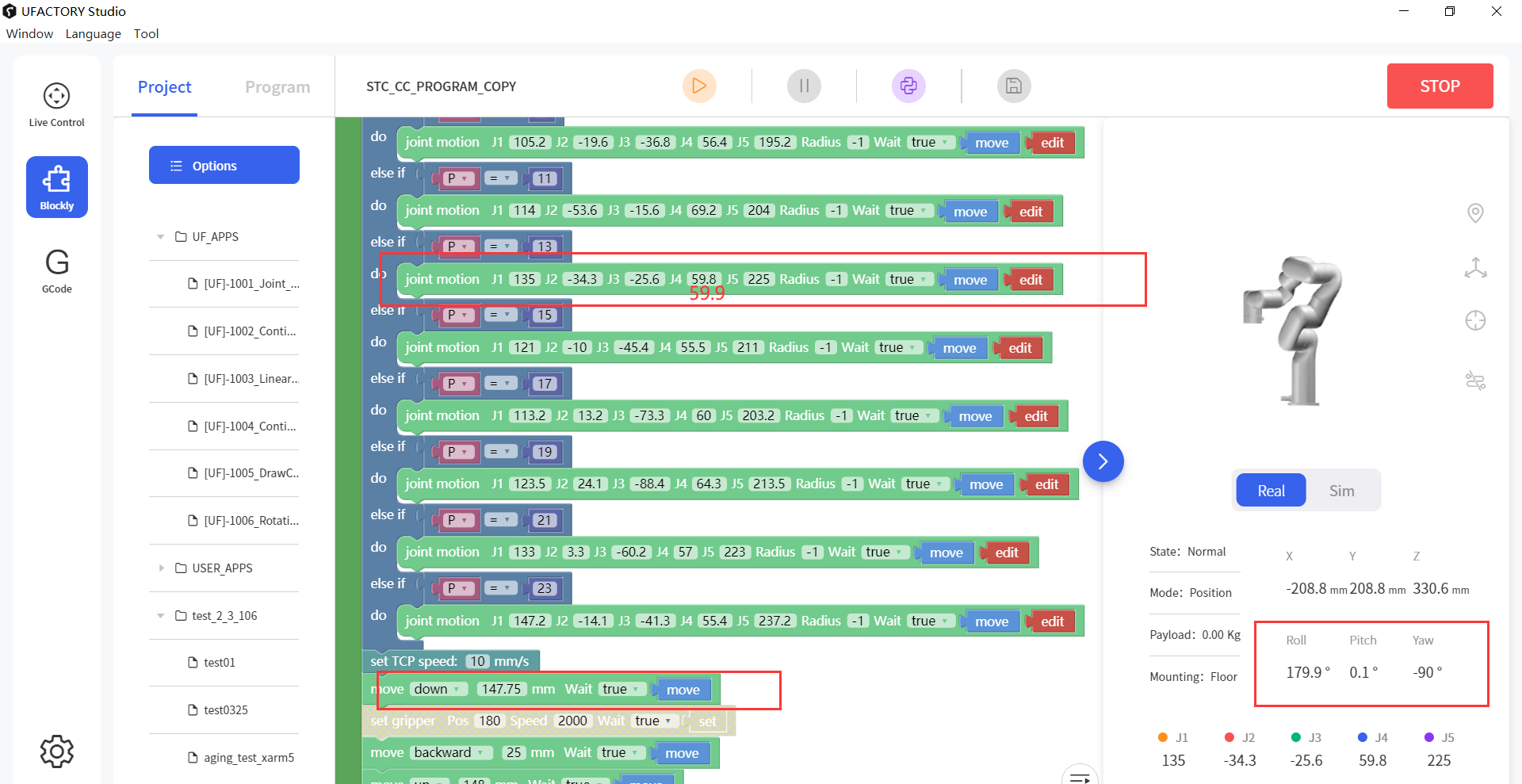
Due to the limitation of xArm5 configuration, before starting TCP motion, it is necessary to ensure that the end flange of xArm5 and the base are completely parallel, the roll and pitch should be [180°, 0°], otherwise the trajectory is most likely to have no solution.
For example, you can see that at the point P=13, the end flange is not level, the roll and pitch are [179.9°, 0.1°], please level the end flange before TCP motion. For this command, you can modify it as [135,-34.3,-25.6,59.9,225].
You mentioned the program could work fine before, do you remember which version of firmware and UFactoryStudio version you used?
Regarding the configuration file, you need to add a prefix ‘xarm5_’ before importing, for example: xarm5_configs.tar.gz
Best regards,
Minna
Ok let me try that and also import the original config file into the current robot. Sorry, we don’t have any record of which previous version was used.
@Kamesh_Patel @Minna can u share the instruction to my email? I have same experience, the flash drive failure.
@Minna I’ve identify the problem is from the flash drive, because when I use flash drive from another control box, the IP can be accessed. using the bad flash drive I cant access the IP.
Hi Sena,
Please send the SN of your controller to support@ufactory.cc, thank you.
Best regards,
Minna