Hey Daniel,
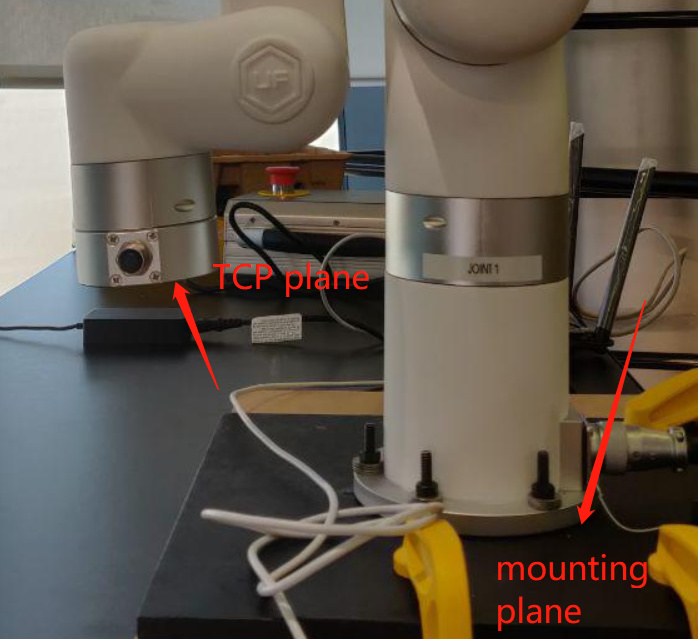
I ran the script you just sent and it worked, it cleared the error. But may have caused some other problems with the orientation of the robot arm.
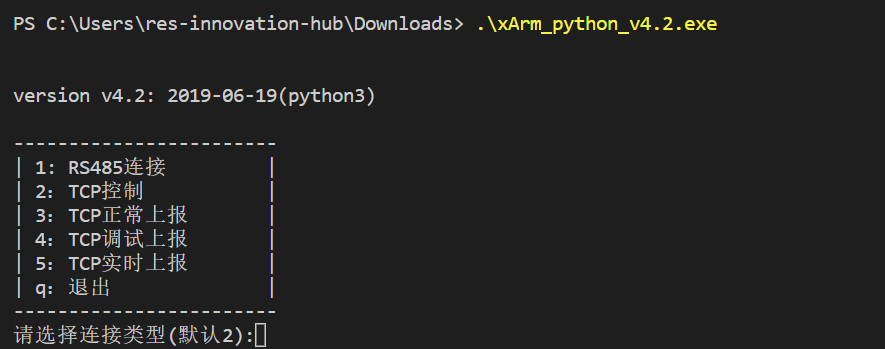
Here is the output in the terminal after running the script.
This program is only used to clear multi-turn encoder errors
Please input the xArm ip address[192.168.1.194]: 192.168.1.218
Ip: 192.168.1.218
main-socket connect 192.168.1.218 success
is_old_protocol: False
version_number: 1.2.2
[set_state], xArm is not ready to move
Connect success!
[1] state(200)=[1, 300]
[1] state(A03)=[1, 0]
[1] state(A04)=[1, 1]
[1] state(01C)=[1, 0]
[1] clear muti-turn, ret=[1]
[1] state(01C)=[1, 0]
==================================================
[2] state(200)=[1, 300]
[2] state(A03)=[1, 0]
[2] state(A04)=[1, 1]
[2] state(01C)=[1, 0]
[2] clear muti-turn, ret=[1]
[2] state(01C)=[1, 0]
==================================================
[3] state(200)=[1, 300]
[3] state(A03)=[1, 0]
[3] state(A04)=[1, 1]
[3] state(01C)=[1, 0]
[3] clear muti-turn, ret=[1]
[3] state(01C)=[1, 0]
==================================================
[4] state(200)=[1, 4853]
[4] state(A03)=[1, 4724]
[4] state(A04)=[1, 4726]
[4] state(01C)=[1, 4700]
[4] clear muti-turn, ret=[1]
[4] state(01C)=[1, 4380]
==================================================
[5] state(200)=[1, 300]
[5] state(A03)=[1, 0]
[5] state(A04)=[1, 1]
[5] state(01C)=[1, 0]
[5] clear muti-turn, ret=[1]
[5] state(01C)=[1, 0]
==================================================
[6] state(200)=[1, 230]
[6] state(A03)=[1, 0]
[6] state(A04)=[1, 1]
[6] state(01C)=[1, 0]
[6] clear muti-turn, ret=[1]
[6] state(01C)=[1, 0]
==================================================
[7] state(200)=[1, 200]
[7] state(A03)=[1, 0]
[7] state(A04)=[1, 1]
[7] state(01C)=[1, 0]
[7] clear muti-turn, ret=[1]
[7] state(01C)=[1, 0]
==================================================
Please Enter to exit