Hello everyone
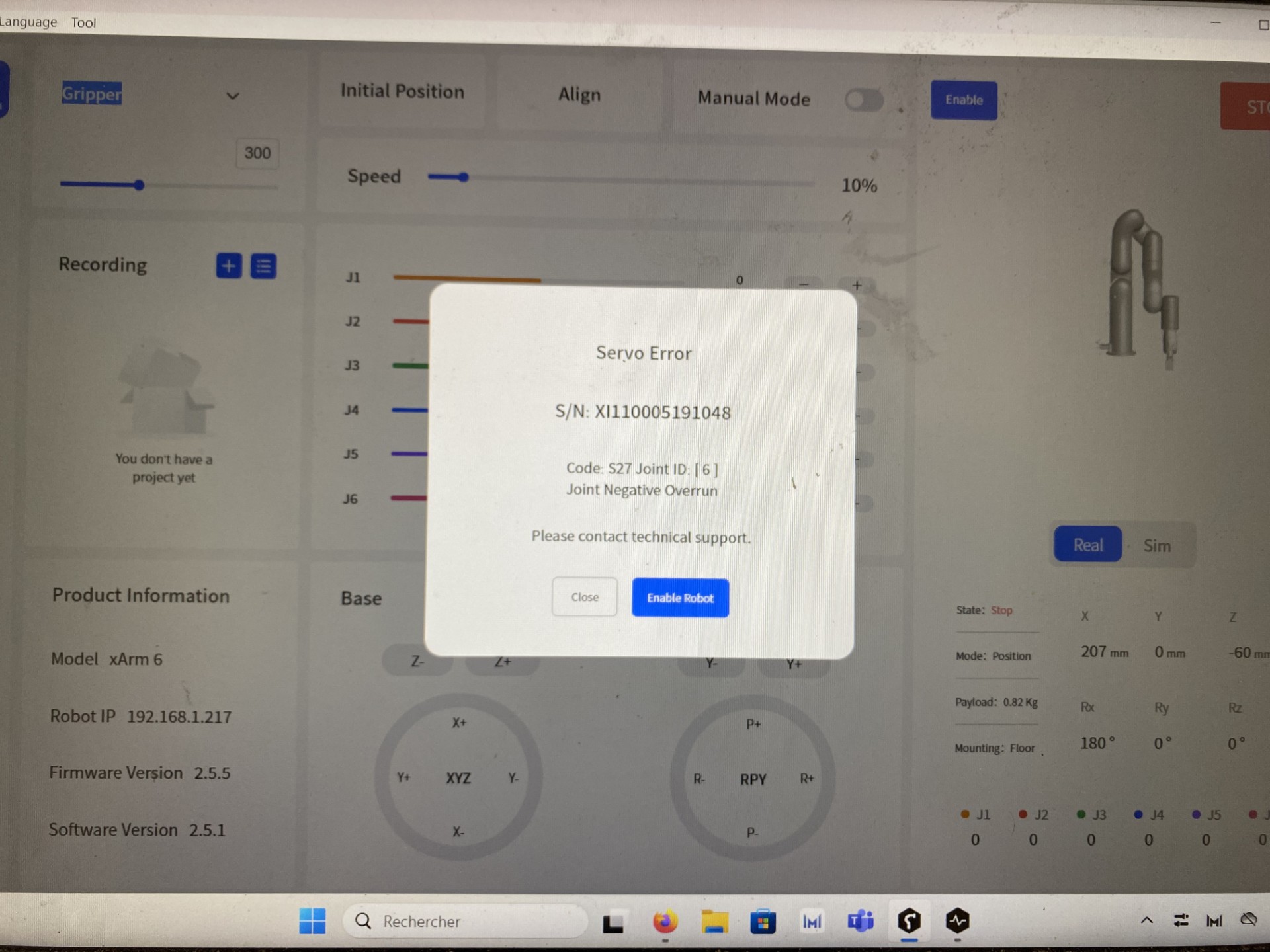
I tried to restart an xarm6 robot after 4 years of non-use. So I updated the robot and software. Since I try to move the robot this error appears.
Can anyone remove it?
thanks in advance
Hi Bonnal,
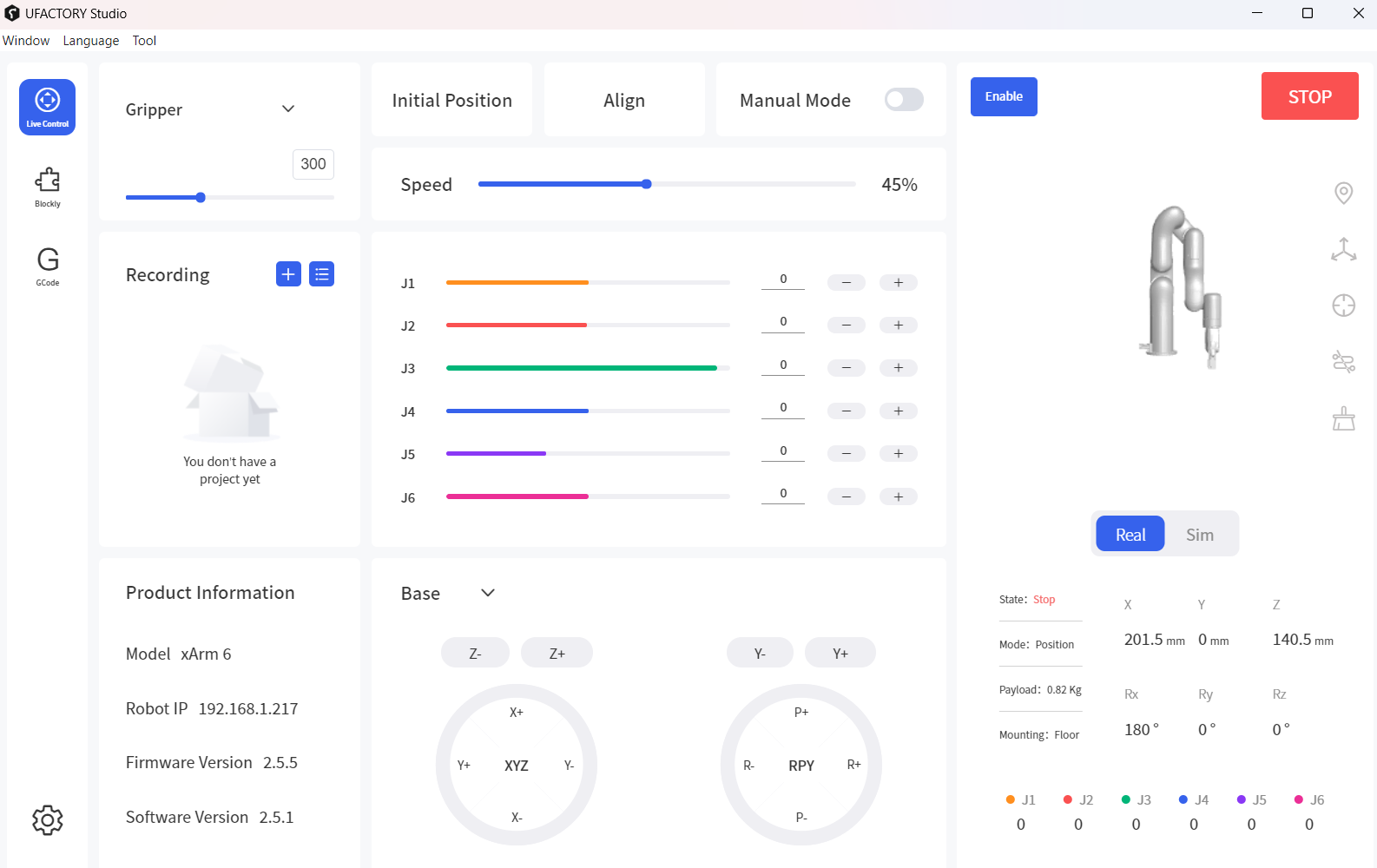
Would you please take a screenshot of the Live control page? I want to check the current joint angle of J6.
Best regards,
Minna
Hi Bonnal,
Please take a photo to show me the current posture of the real arm.
Please enter ‘Settings-General-Debugging Tools-Joint’, enter ‘H101 D1306 V0 I6’ and send, check if you can enter the robot, If yes, please take a screenshot of the joint angle.
Can we have a quick video call to quick solve the problem? I sent the link to you, please arrange a meeting, thank you.
Best regards,
Minna
Good morning,
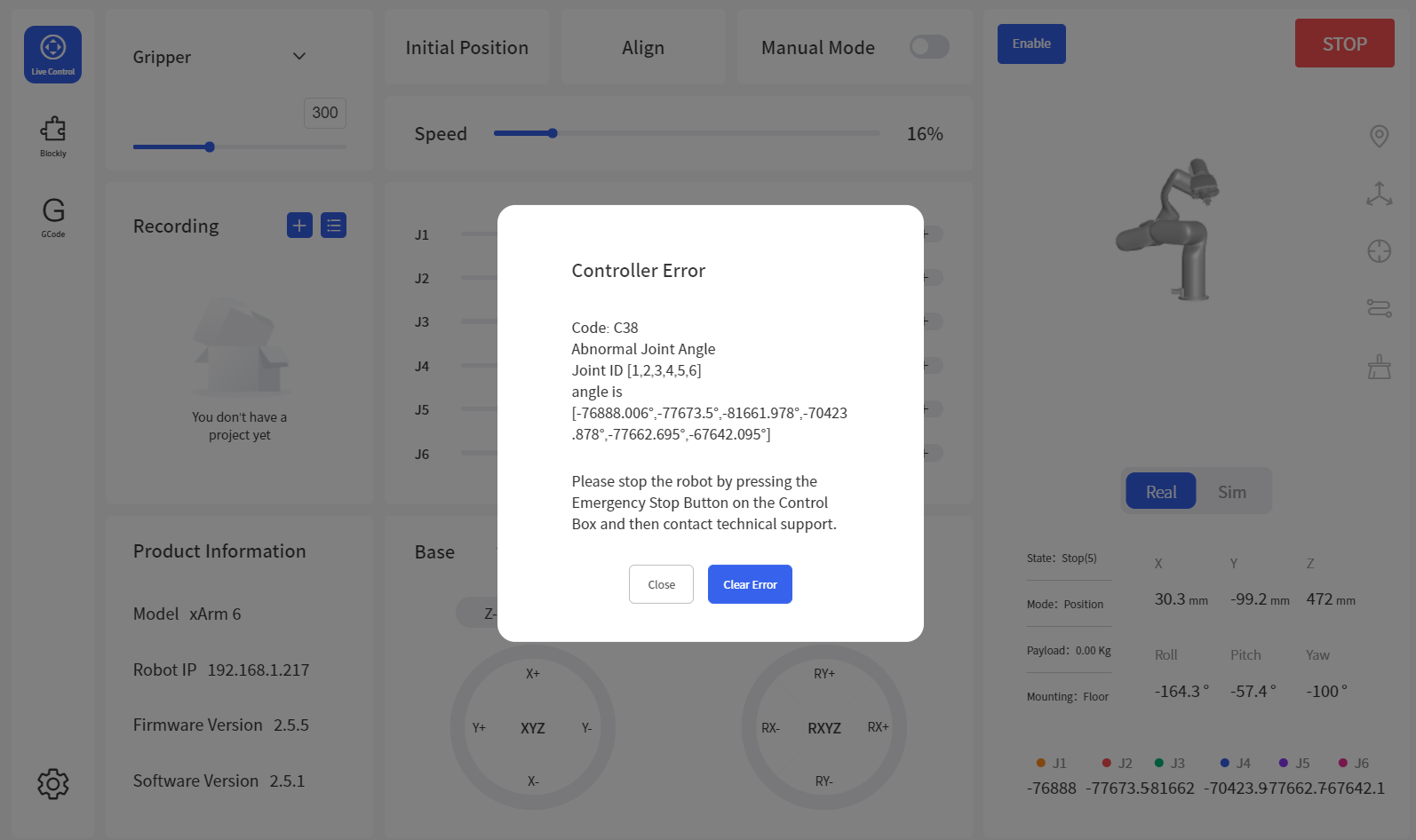
I don’t have much time for a video, I apologize but I just used what you just sent me and the software shows amazing angles
Best regards,
Bonnal
Hi Bonnal,
Please note that you have to power on the arm for 6 hours every 3 months to charge the built-in battery.
I think the encoder data is lost.
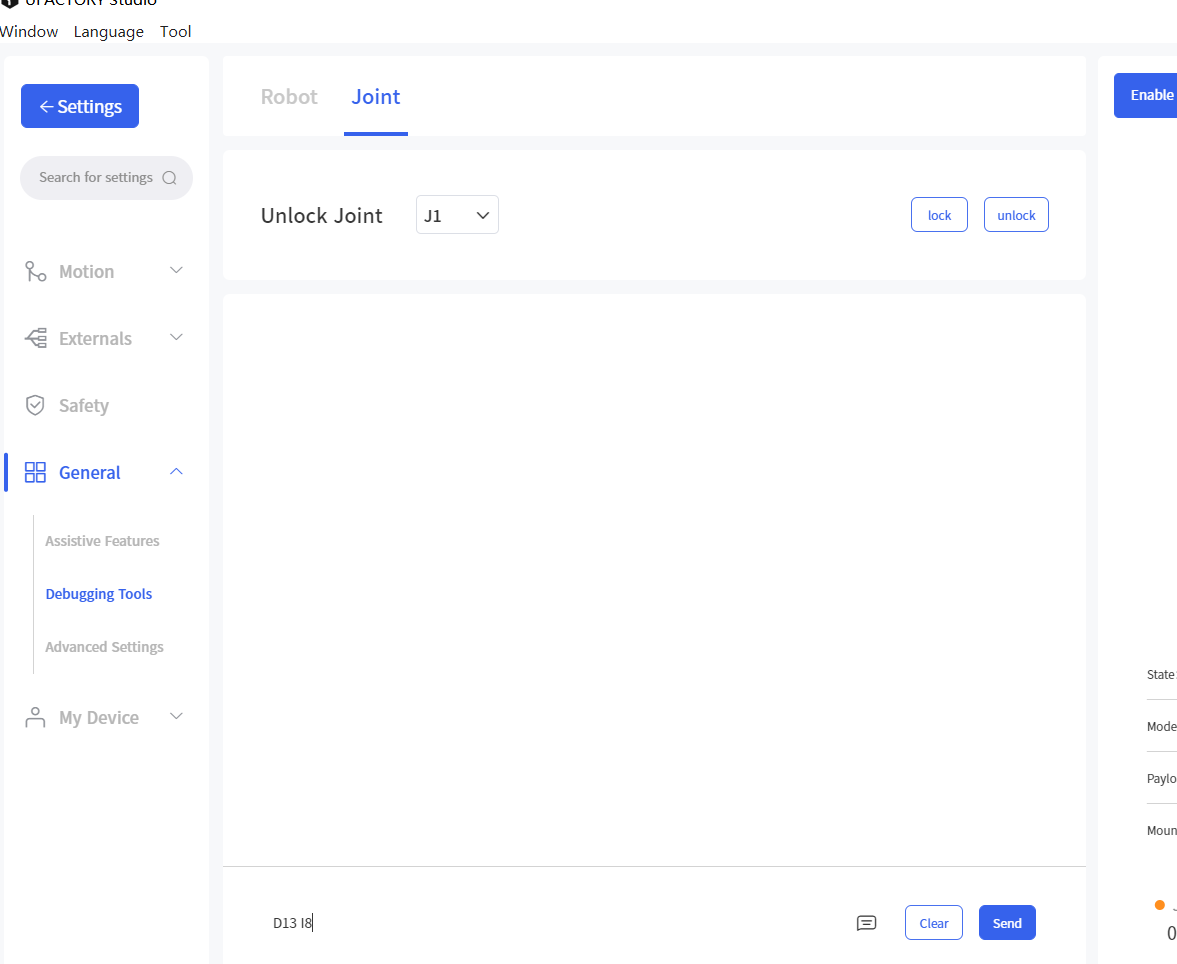
Please release the E-stop button, enter ‘Settings-General-Debugging Tools-Joint’, enter ‘D13 I8’ and send, press down the E stop button and release to take effect, it will set the current position of all joints as 0°.
You can unlock the each joint via ‘joint-unlock’, then move the arm to its original zero position, using ‘D13 I8’ command to reset the zero position again.
If you can control the arm normally, enter ‘H101 D1306 V1 I6’ and send.
Best regards,
Minna