For a risk analysis I would like to know how much force is needed to stop the robot while moving? It is not mention in the manual.
Hi Daanvdw,
You have to consider various cases such as arm speed, acceleration, attitude, sensitivity to collision, the weight of the payload, etc.
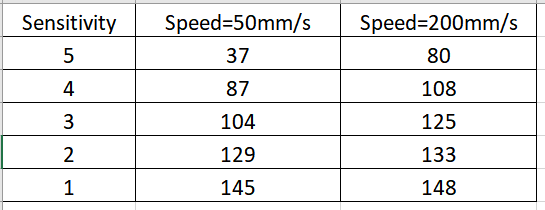
Here is the test data for 1 case for 850, just for your reference:
X in 400mm reach, the robot moves along with Z- direction, and we apply a force in Z+, the payload is 0, and the unit is N.
Best regards,
Minna
Hi, I also want to know force to stop xArm 5.
Do your team have similar test data for xArm 5?
Hi Kojiro,
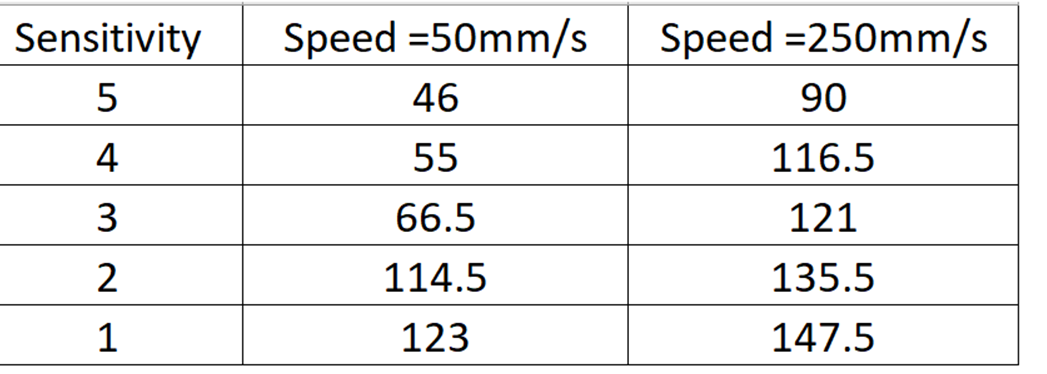
Sorry, currently we only have the data for xArm6, just for your reference.
What is your application? What is your TCP payload and offset?
X in 400mm reach, the robot moves along with Z- direction, and we apply a force in Z+, the payload is 0, and the unit is N.
Hi, Minna
Thank you for the reply.
We use xArm gripper.
Our application is pick and place beverages from shelves. The weight is 2.0kg below.
I want to know how large power will be there when the arm hit the shelves.
Hi Kojiro,
It depends, related to speed, acc, jerk, posture, etc.
What do you need this data for? Can you provide a video of your application?
Best regards,
Minna
Hi, Minna
It’s for risk assessment and mechanical design.
Since we are in the design phase, there is no hardware, and I can’t provide the video as of now.
For the risk assessment, I assume
- there is a shelf that is located 350mm away from xArm5 in the y-axis
- Hit the shelf with maximum speed and acc
2025/03/14 added)
As I cannot make 4 replies in a topic, I write here.
Sorry, above image is misleading.
I want to know y-axis force to analyse overturning risk.
Hi Kojiro,
Honestly, it’s not easy to test the force if the robot moves along with Z+ direction.
I will test it tomorrow, when X=500mm, the robot moves along in Z- direction with max speed and acc, and applies a force in Z+, but the data is just for your reference.
Best regards,
Minna
1 Like
Hi Kojiro,
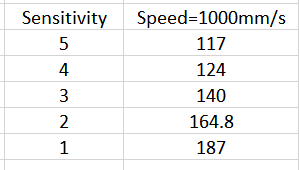
Please check the test data, just for your reference.
X=500mm, speed=1000mm/s, acceleration=50000mm/s², xArm5 moves along Z- direction and we apply force in Z+ direction, the Unit is N.
1 Like