I have two XARM7, and I install force torque sensors on them. One is working fine, but the other one keeps showing ControllerError, code: 50 and
ControllerError, code: 1
[SDK][ERROR][2023-05-11 13:12:43][base.py:348] - - API → set_modbus_gripper_enable(enable=True) → code=1, code2=0, err=0
[SDK][ERROR][2023-05-11 13:12:43][base.py:348] - - API → ft_sensor_enable → code=1, on_off=True
[SDK][ERROR][2023-05-11 13:12:43][base.py:348] - - API → ft_sensor_set_zero → code=1.
Does this mean that the other force torque sensor is not reading correctly on the XARM? And what can I do about this? I’ve tried uninstalled and installed, but still bugging.
Would you please take a screenshot of the error page?
Please provide the SN of the FT sensor to minna.zhong@ufactory.cc.
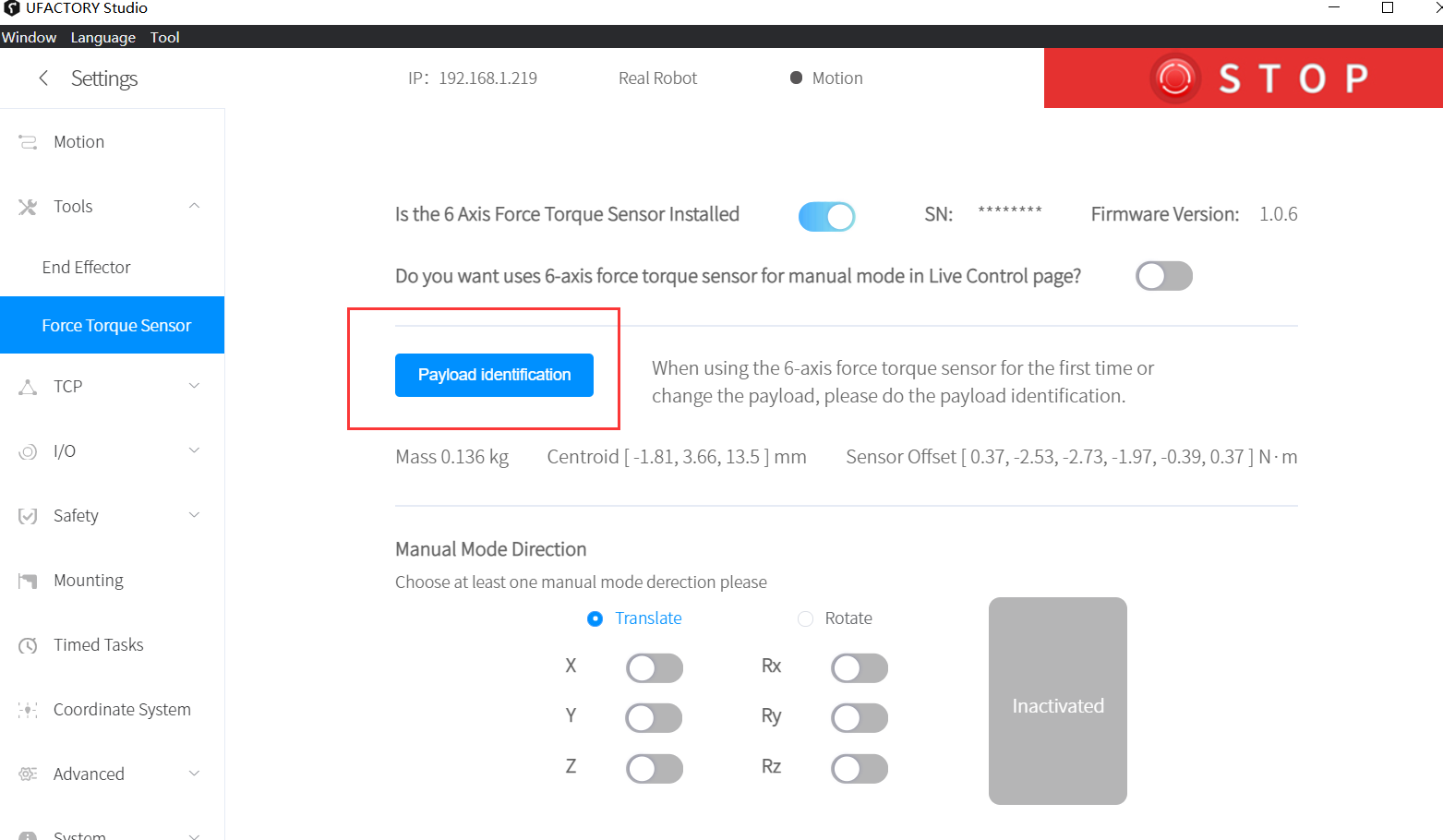
Can you do the payload identification successfully with this sensor via our UFactory Studio ‘Settings-Tools-Forece Torque Sensor’? What is the error?
SN of robot is XS130303221L05, Firmware version is XS1303, Ufactory Version 1.10.0, SN of Sensor is AI13010322001A.
The thing is I find my two XARM7’s end connecting structures are different, so that their force sensors are different(one of screw is of different size), so I cannot try the good sensor on this Xarm
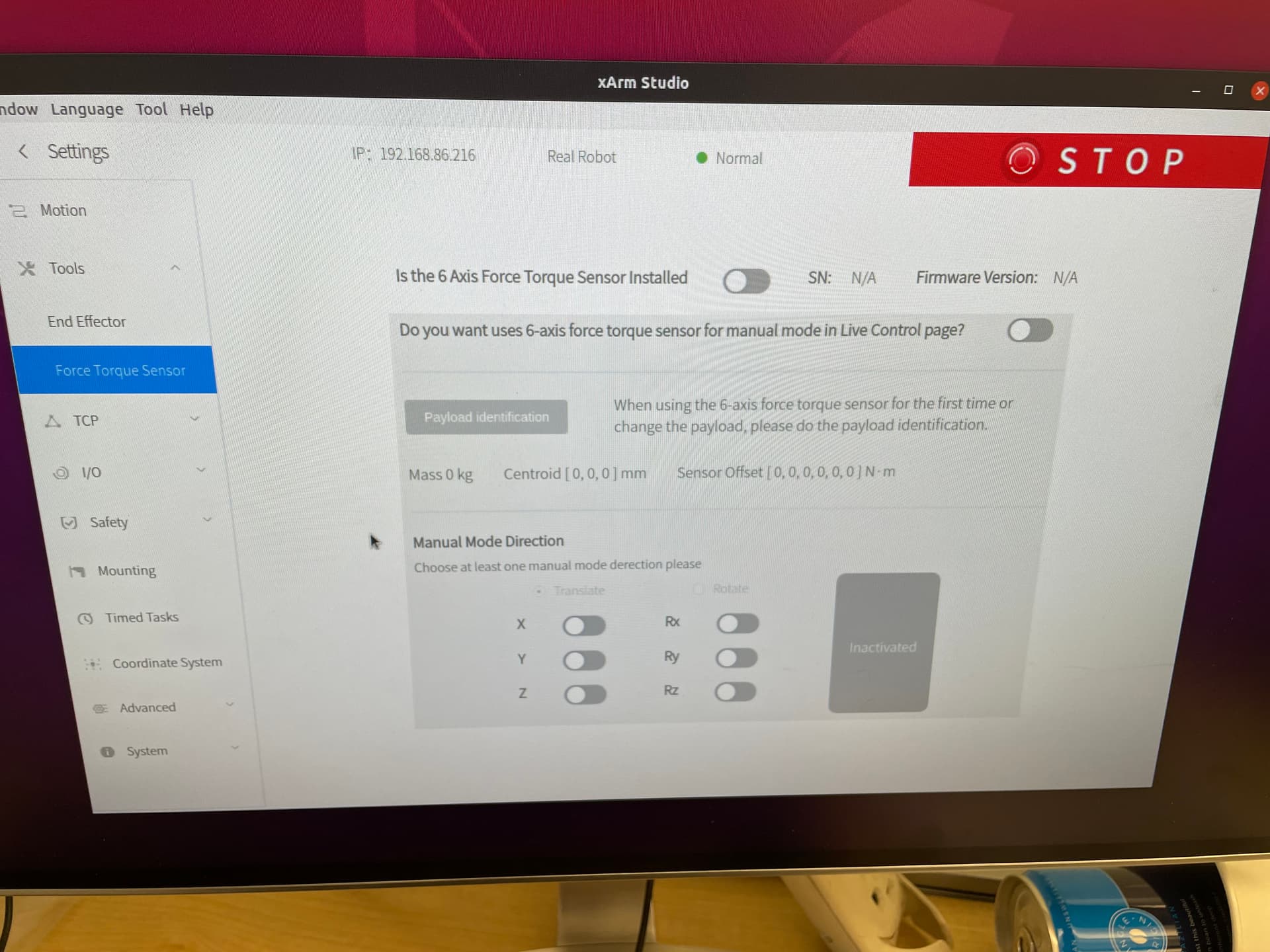
And yes, I cannot enable this option. The xarm simply cannot sense the sensor at all.
I wonder if you can send me a compatible new sensor.
Please take a screenshot of ‘Settings-System-System Info’.
It will disable the ‘is the 6 Axis force torque sensor installed’ option automatically when you enable this option, right? Can you shoot a video? Is it possible to have a quick meeting to troubleshoot the problem?
Please send an email to minna.zhong@ufactory.cc and I will arrange a meeting for remote assistance.