I found python SDK functions for get_position, set_position, and set_tool_position, but I can’t find one for get_tool_position.
How do you get the current tool position in x,y,z,pitch,yaw,roll or axis angle.
Does anyone know how to do this?
Thanks!
I found python SDK functions for get_position, set_position, and set_tool_position, but I can’t find one for get_tool_position.
How do you get the current tool position in x,y,z,pitch,yaw,roll or axis angle.
Does anyone know how to do this?
Thanks!
Hi Scott,
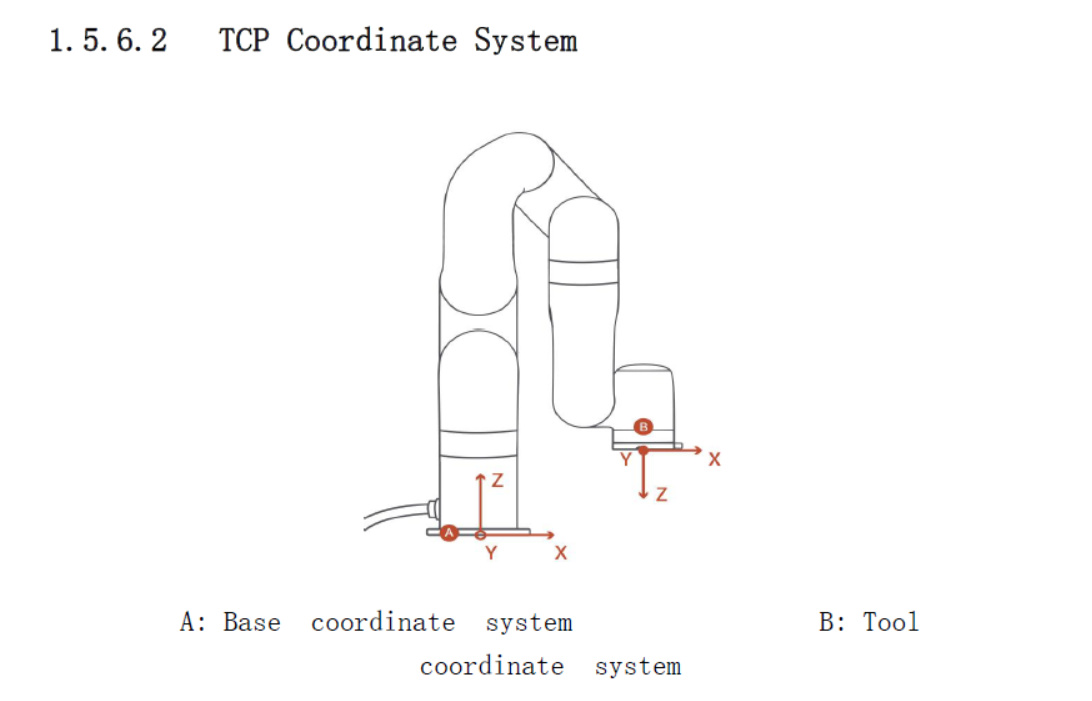
There is no absolute position coordinate in the tool coordinate system, because the tool coordinate system is not fixed, the center of the end flange is always the zero position under the tool coordinate, so it can only do relative motion.
What is your application? Please clarify which position you want.
Best regards.
Minna
Hello all,
I am using Xarm6 lite andI have installed Python SDK and now I am testing all the examples given in that SDK. I got some doubt that, what is the difference beween set_position and the set_tool_position. when i test this code
arm.set_tool_position(x=100, y=0, z=0, roll=0, pitch=0, yaw=0, speed=100, wait=True)
print(arm.get_position(), arm.get_position(is_radian=True)), It hs given me the different values like this than the set tool position. I wanted to know the differenc
(0, [187.0, -0.0, 154.199997, 180.00002, -0.0, -0.0]) (0, [187.0, -0.0, 154.199997, 3.141593, -0.0, -0.0]).
Could anyone can clarify my doubt.