having xArm5 and the corresponding AC Control Box.
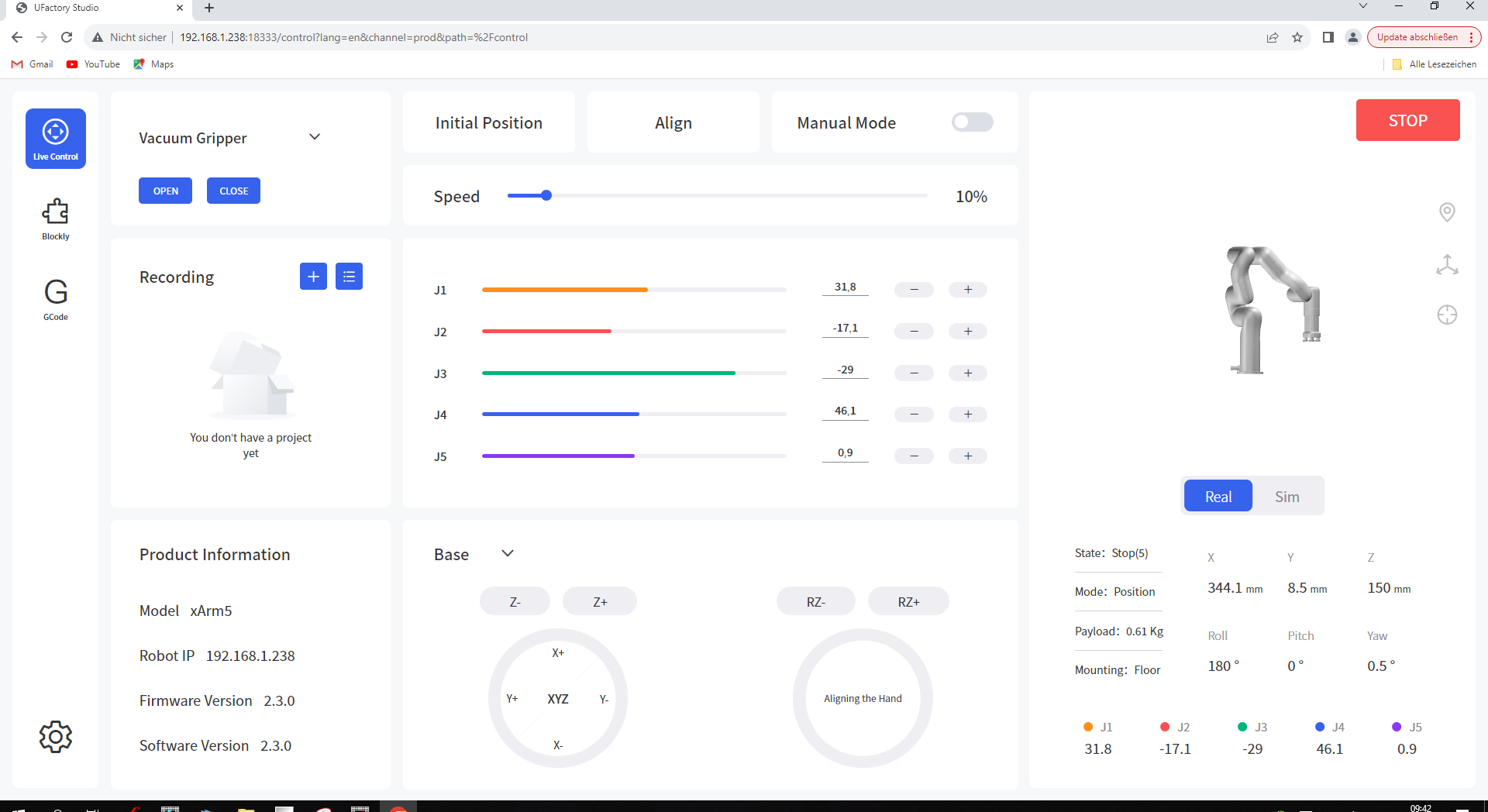
Robot Model: xArm5
Robot SN XF130308B22B05
Firmware: 2.3.0
Studio: 2.3.0
Control Box SN: AC130303A3009C
We are launching multiple BLockly Tasks via Modbus TCP. Works fine as intended.
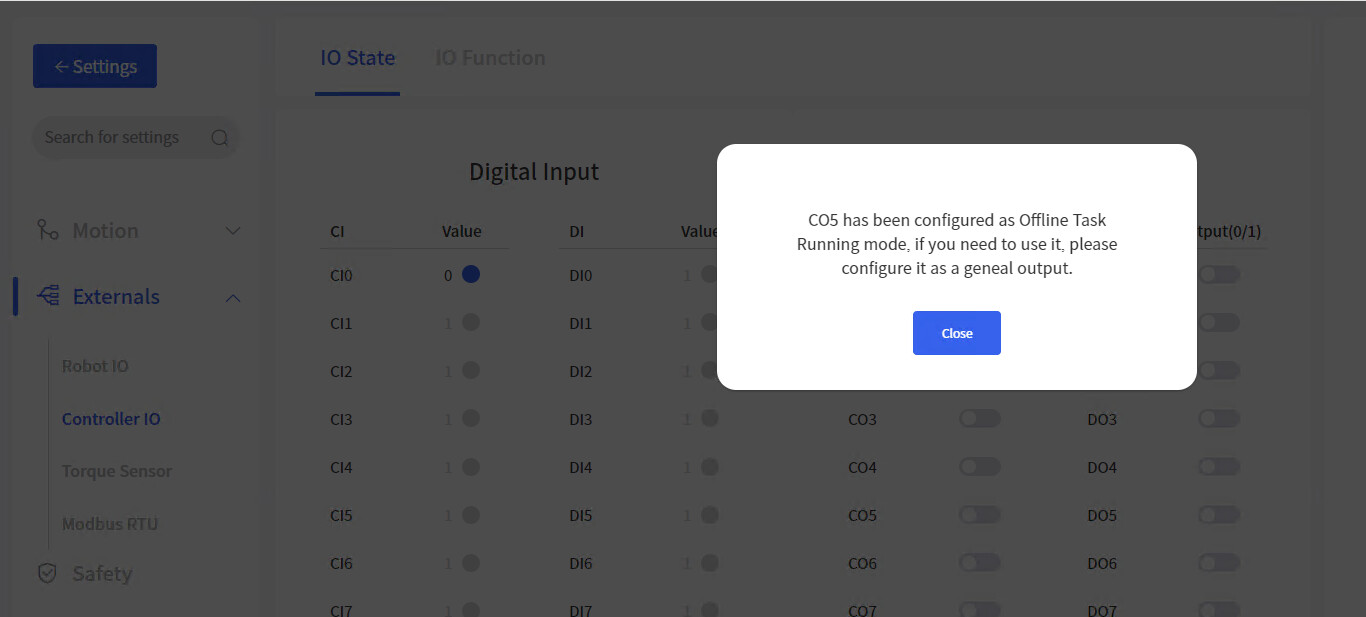
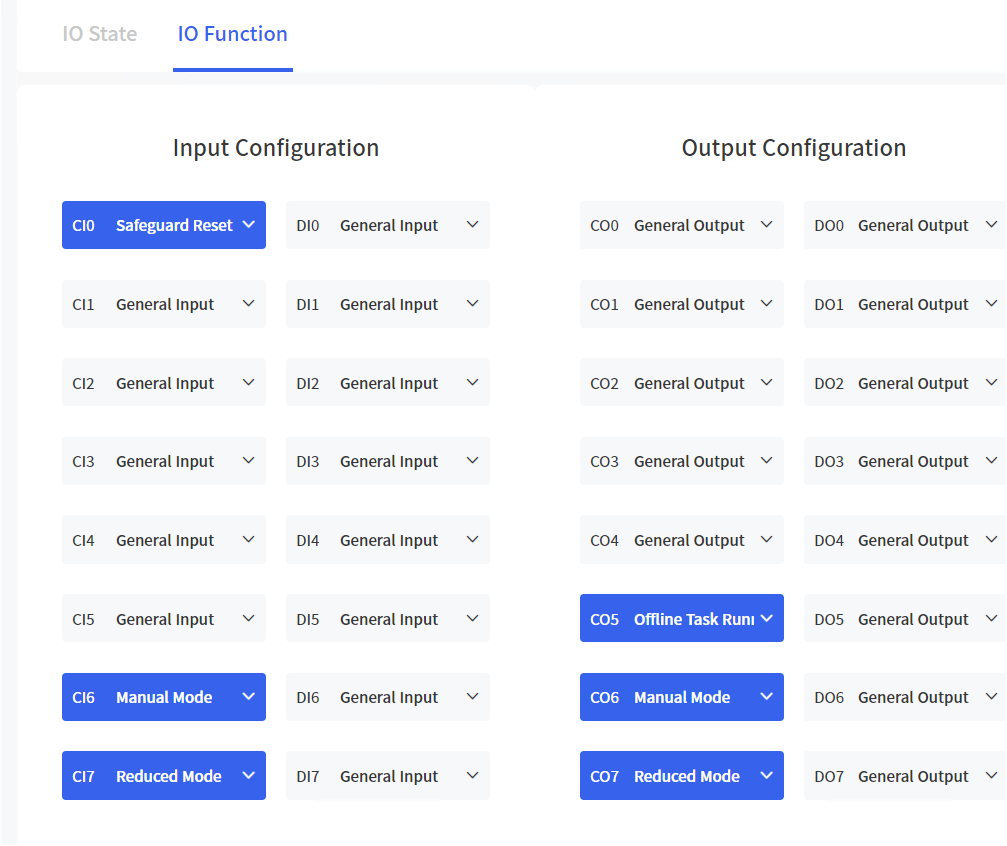
For Identification we have one Output set to Blockly Offline Task Running (in our Case CO5). This is read via the SPS, if the Blockly task is still running, despite having Wait commands inside the Blockly.
Sometimes this Output gets stuck, when the Blockly Task ends. The COBOT sends Normal, no motion and no error. But the Output is still set. The Output gets reset, when we push the STOP Button on the Web Page.
This might not be the intended behaviour, and i cannot find any systematic issue, since this only happens from time to time. Also on different Blockly Programs…
We “could” change from the fixed Output Setting to user-defined GPIO Command in each Blockly Program, but this is much work to do… Since we have 40+ Programs and multiple if-statements ect.
Do you have any advice, why this happens so random?
Do you mean the CO5 will keep at a high level even when the offline task is finished? At that time, can you switch it to a low level via ‘Settings-Externals-Controller IO-IO State’?
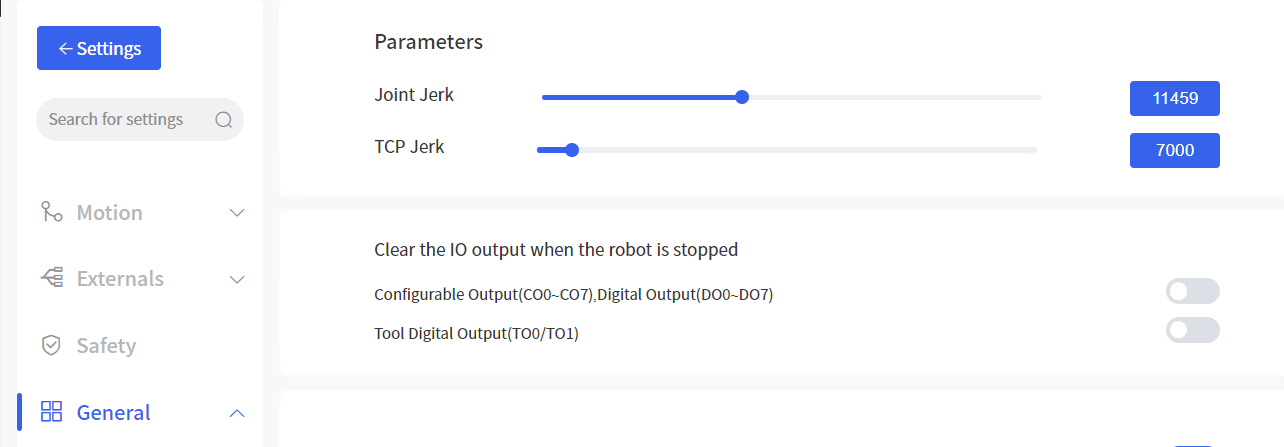
I think you enable the option in ‘Settings-General-Advanced Settings-Clear IO output when the robot is stopped’, this way the IO will be reset when you push [STOP] button.
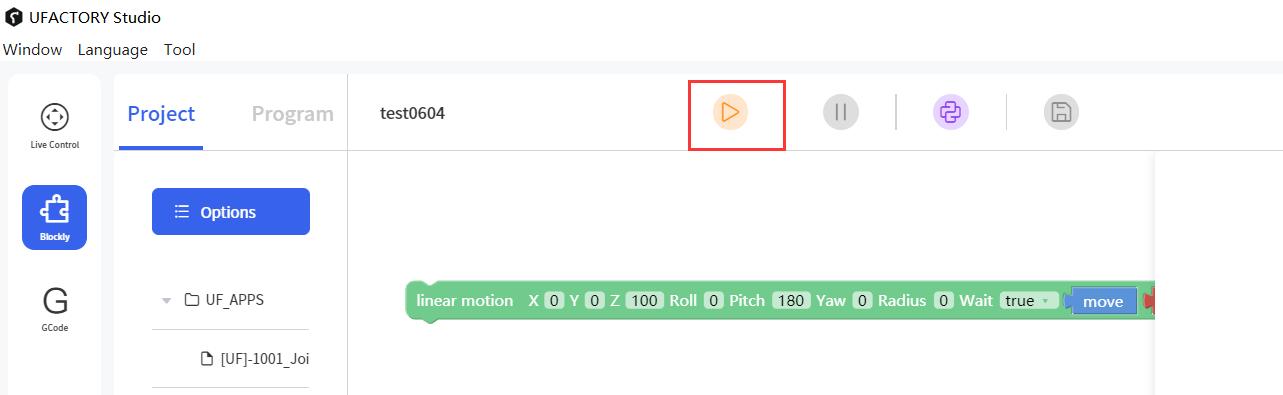
When the output gets stuck in high level, please enter into the Blockly module, and see if you can run any Blockly project normally. What does the icon below look like at that time?
I will create some Screen Dumps the next time this happens. And which Blockly Program was ran right before that. I will try to run a different, simple Blockly Program through the Modbus TCP interface and through the Blockly Website.
I will answer to this Topic, when i have further Information.
Would you please share the Blockly project to support@ufactory.cc?
Not quite understand, What is the expected behavior?
I didn’t see any code in your py script to set CO5.