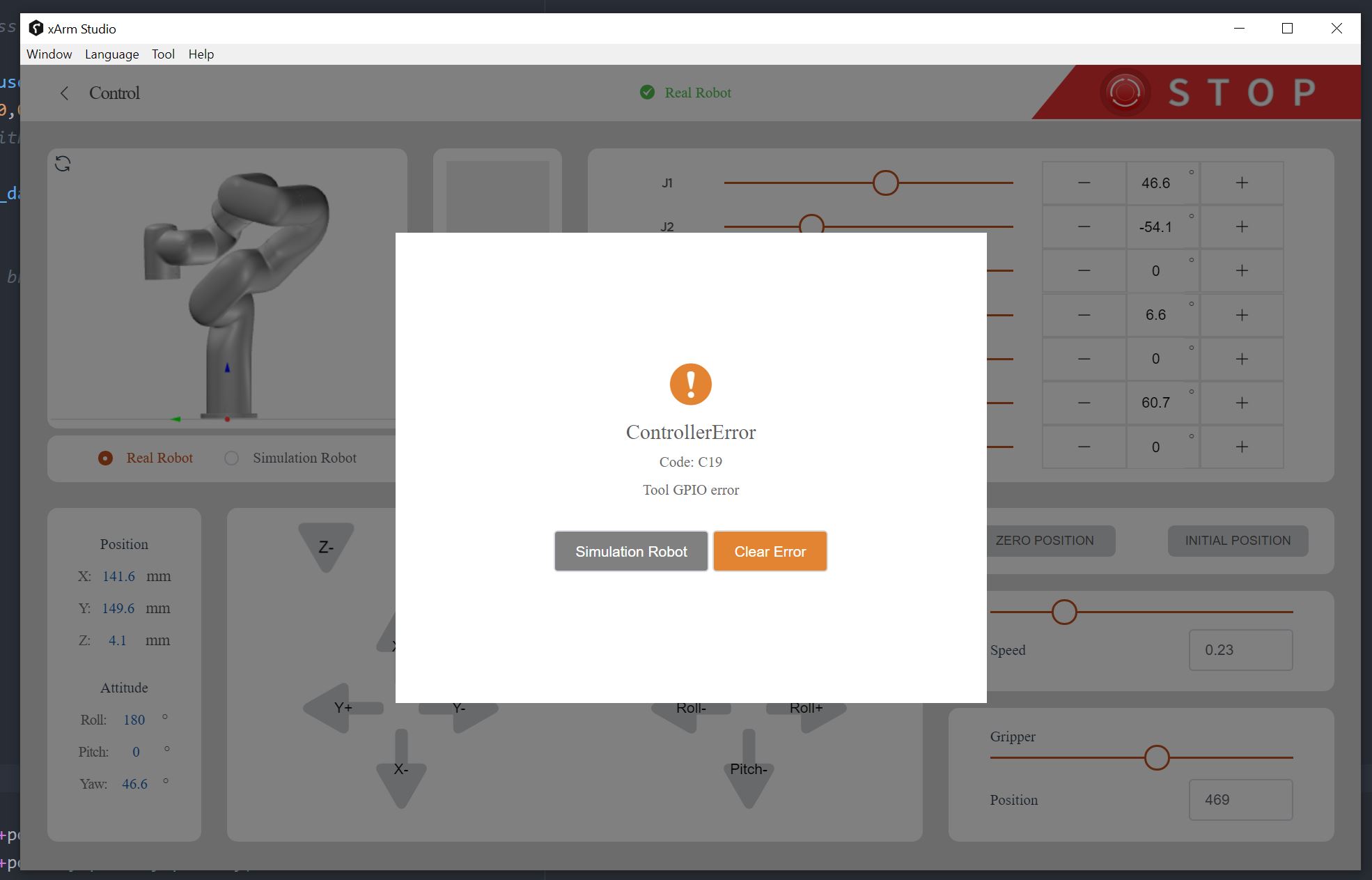
I am currently coding my xArm 7 to paint using the python SDK. I also have xArm studio open so I can manipulate the robot manually if needed. Each time I open or close the gripper I get Error Code C19. This error happens with both xArm Studio and when controlling the xarm from Python.
My work around has been to restart my command window and then initiate a new *.py file each time I need to open/close the gripper. I use xArm Studio to clear the error so I can keep going.
Here is a screenshot of the error in xArm Studio. My goal is to continuously control the gripper in my Pythin code and not have to restart the program. Thanks in advance for any advice.
Joanne