I’m using an Xarm7 (XS130510D43A14) with a Ufactory force-torque sensor (Al13021224008) and I’m facing a few issues while using the arm in impedance control mode:
I notice that sometimes (not necessarily, but mostly after a collision / force-torque sensor overload) the robot does not move to the desired pose set using: set_position_aa(axis_angle_pose, speed=50, mvacc=500, is_radian=True, relative=False, wait=True
but rather starts to move slightly down/in some other direction as well. I’m attaching two videos (with impedance K = 300 and K = 1000) both of which are supposed to go to the handle of the dishwasher (which it goes to in normal operation)
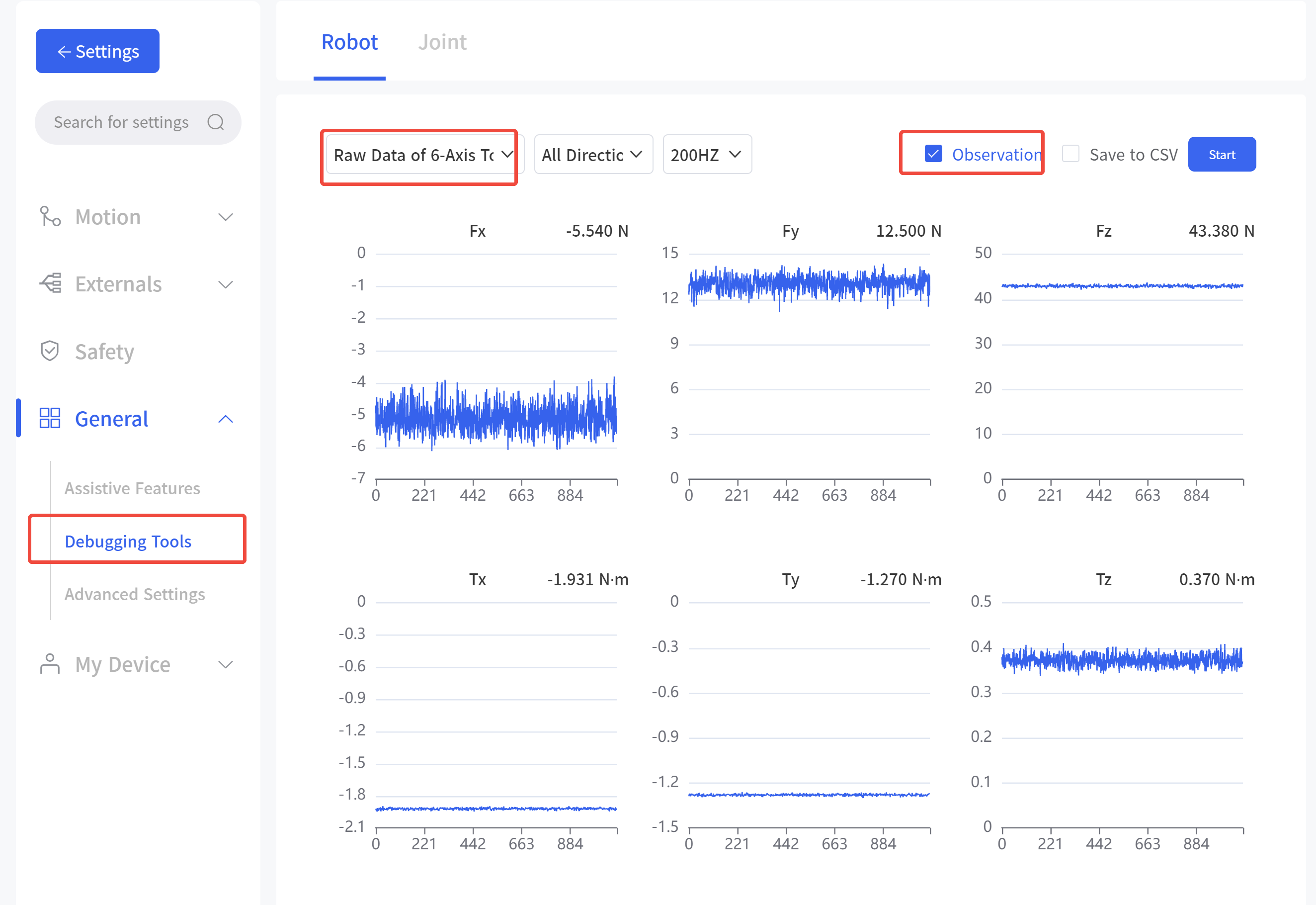
I’ve removed the gripper and and reset the arm to home position, the Fz seems to be quite off (97N) but the other values are fine and there doesn’t seem to be much variation in the observation:
The equivalent mass (M) is set to 0.06 in my script and J is set to 0.01 * M
(note that currently, I’m only running impedance on the x,y,z axis and not Rx, Ry, Rz)
Although the force-torque sensor readings are already out of the factory threshold, it can still be used. You can send it back for inspection and repair when convenient.
In the meantime, try increasing the equivalent mass parameter—e.g., set it to 0.08 kg or higher—and see if it improves the impedance behavior.
Thank you, I’ll try to increase the equivalent mass parameter and update you once done. I’ll send it back for inspection and repair in case that doesn’t work.
Sure, in case that you need repairment service, just copy the link of this post, send the link along with your shipping information to the support@ufactory.cc