Dear UFactory Support,
we have been experiencing an issue with our UFactory xArm 7.
(1) SN of the xArm
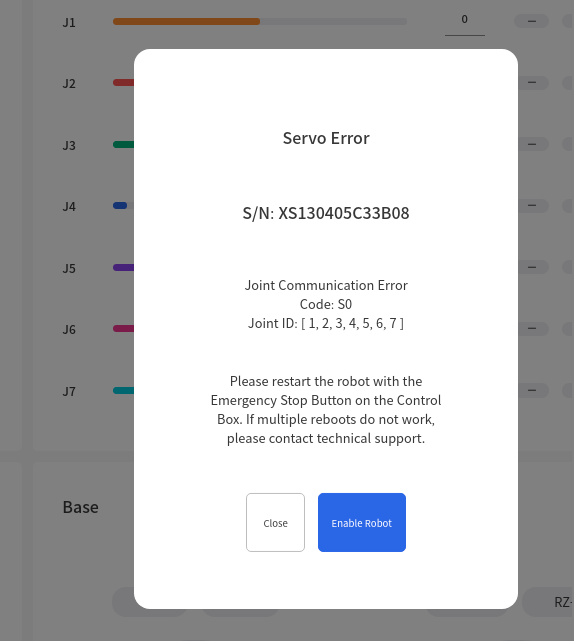
S/N XS130405C33B08
(2) Time when the problem occurred
2025.07.29
(3) What operation was performed on the xArm before the problem occurred.
We were running example scripts (Python SDK) to use the force torque sensor.
After pressing and releasing the emergency stop during a short break, we received these errors (see images).
(4) Pictures or videos used to describe the problem.
(5) Abnormal phenomenon occurred in the robot arm.
In xArm Studio it sometimes it says that only Servo 1 has communication errors, sometimes all of them. But the robot never works.
We have tried to restart it multiple times. Sending the D11 command (debugging) results in code 0 with the output data: [1003, 1003, 1003, 1003, 1003, 1003, 1003].
(6) The way to control xArm
xArm Studio and Python SDK
We tried to contact you via E-Mail multiple times.
We would truly appreciate some assistance.
Many thanks ![]()