Can I follow a rule how to calculate a joints position.
Let me explane,I go the a certain posiition, I want to move down 200 mm on this position,
I can do that with the move command but it’s to slow, if I can caluculate
this position in joints I can go much faster to the goal.
I know it’s inverse kinematics, but can you give me a clue how to calculate it?
I have a six arm cobot.
Hi Daniel,
Thanks for explaining,
So if I go to a certain distance and get from there the ‘get_ik’ to calculate move 130mm down, I get not the correct joint values?
Continuous motion without using joint positioning is way to slow.
The best I can do is to make a small program to go to every position and save this coords, then afterwards I can do joint positioning,
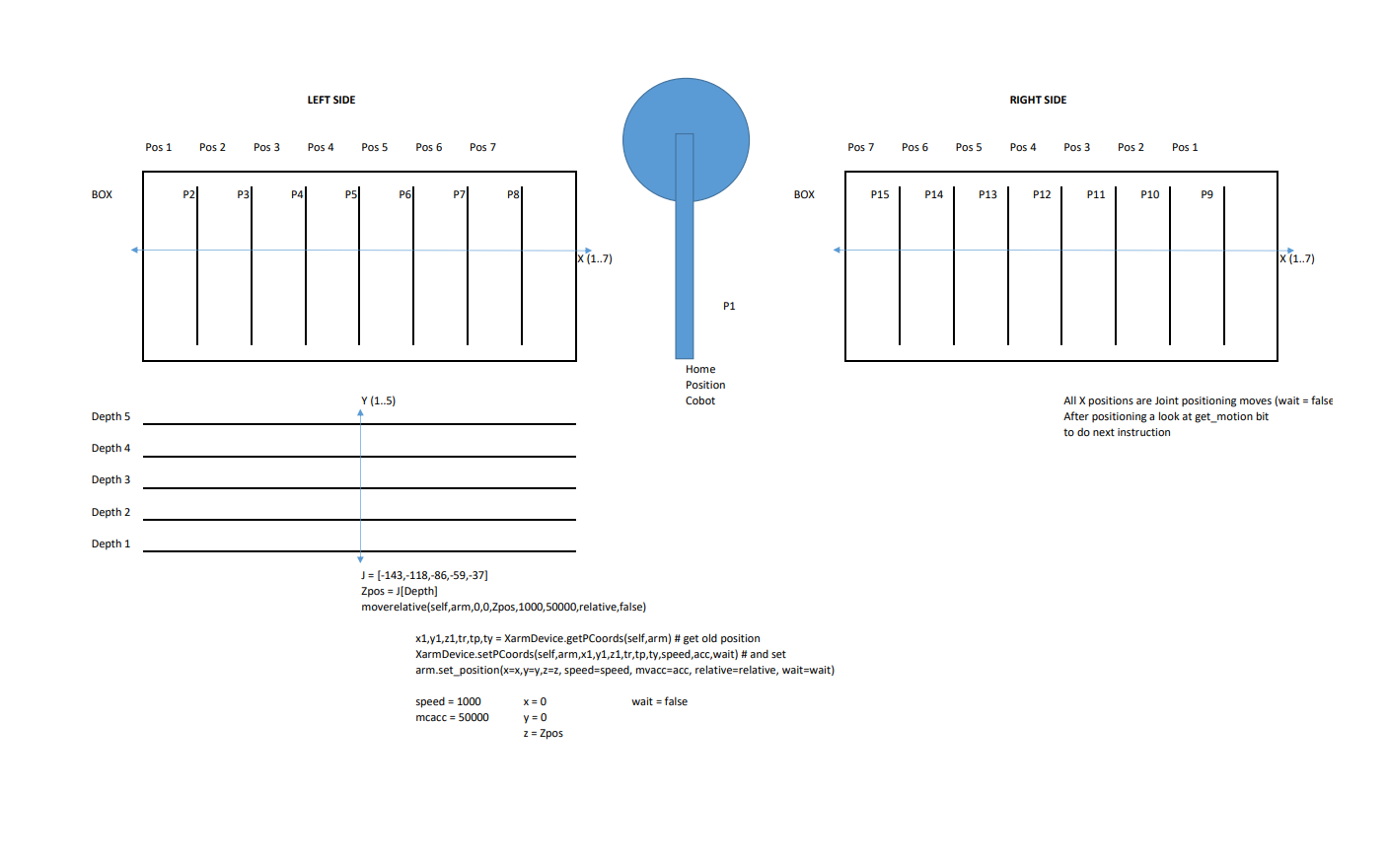
It’s a bit anoying to do it that way, in the box I drop the product I have to set 7 rows x 5 high = 35 positions above and 35 positions under,
and I have to do it for both left and right side of a box, so a lot of parameters.
For now I go with joint positioning above the row and wait on bit no motion then I relative position to z -depth in mm, It’s easy to change and
I have just 7 joint positions for a box. ( at all positioning instructions i set ‘wait on false’ and look at motion bit to go to the next instruction, it’s a little bit faster
than using ‘wait is true’ at every positioning instruction.)
Is this the way to go or do you have another solution in mind?
Hi Danny, So if I go to a certain distance and get from there the ‘get_ik’ to calculate move 130mm down, I get not the correct joint values?
No, you will not get correct joint values for a point which is more than 10mm from the current TCP position of the robot.
I made 2 examples to let the robot do same task with linear motion and joint motion, please make sure that the firmware/xarm studio of your robot are both 1.6.1 and then try the 2 Blockly projects on your xArm 6 robot to see if you could find some ideas for your project.
Download link: https://drive.google.com/drive/folders/1grzPJbQCkjTnqqrrwKEO4ZPx_Ao6_Dqj?usp=sharing