Hello,
I’m trying to load the recorded trajectory by name by sending the following packet:
0x00,0x01,0x00,0x02,0x00,0x0A,0x3F,0x74,0x65,0x73,0x74,0x2E,0x74,0x72,0x61,0x6A
Even after creating a “test.traj” trajectory (to send the exact packet from the developer guide) and trying to load it nothing happens, the arm does not send any response packet. Is the packet format correct? How can I load and run the recorded trajectory using MODBUS TCP packets?
Hi Sir,
Here are some mistakes on the manual, please check the command as below.
set mode: 00 01 00 02 00 02 0C 00
set state: 00 01 00 02 00 01 0D
load trajectory: (test.traj)
00 01 00 02 00 52 3f 74 65 73 74 2e 74 72 61 6a 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
play trajectory:
00 01 00 02 00 09 40 01 00 00 00 01 00 00 00
Best regards,
Minna
Thank you for your answer. Your packet works.
Now I have the following questions:
- What is the format of the packet you’ve sent (for example, why do we need to send dozens of zeros at the end of the packet? Are there padding zeros or something else)?
- Is there any possibility to import trajectories using Modbus TCP (without connection to PC)? We have a “developer” arm in our lab and we want to record trajectories once and deploy them all on the production arms. However, there is no packet to load a trajectory file or create it point by point, There is only a command to start and stop recording and to save what was recorded manually.
- Is there any possibility to manage (get state, load, play, import or export) Blockly files using Modbus TCP? We’d like to run these programs using our controller, not a PC with UFactory Studio or UFactory SDK.
Hi Sir,
- Actually we use private TCP, it is based on Modbus TCP but not the same. We reserve 80 bytes for the trajectory name, so the data length should be 82.
- For now, you can only import the trajectory file via our UFACTORY Studio software.
- You can trigger the Blockly project via Modbus TCP, but can only import the Blocky project via our software. For your reference:
How to start the Blockly project via Modbus TCP? - UFactory docs
We will evaluate internally if we can add the SDK to import trajectory/Blockly file.
Best regards,
Minna
Hello again,
It worked before update. Now it runs only once, then the mode changes to “Running trajectory” and the arm stops executing commands. The only thing that helps is to move the arm through the web interface so that the mode changes again to “Position”.
Is it possible to set arm mode through Modbus TCP? I didn’t find any packet like “Stop playing trajectory” or something like this that can return the arm to the initial status.
Best regards,
Lev
Hi Lev,
What is the current and previous firmware/ufactoryStudio version?
Which command did you send? Do you refer to our private TCP or standard modbus TCP?
Standard Modbus Tcp:
Private Tcp:
Private TCP:
0x0C can be used to set state.

Best regards,
Minna
I’m using the private TCP. Motion state setting command doesn’t help.
Firmware and software version is 2.3.0.
Hi Lev,
Which command do you use?
set mode: 00 01 00 02 00 02 0C 00
set state: 00 01 00 02 00 01 0D
Best regards,
Minna
Hello,
I tried your commands and it does not help. The arm really moves after sending the “play trajectory” packet but then its state changes to “Running trajectory” thar can’t be reset using these packets.
Here is the command log (I tried running 1.traj path):
Write data
00000000: 00 01 00 02 00 02 0C 00 ........
Read data
00000000: 00 01 00 02 00 02 0C 00 ........
Write data
00000000: 00 01 00 02 00 01 0D .......
Read data
00000000: 00 01 00 02 00 03 0D 00 | 02 .........
Write data
00000000: 00 01 00 02 00 52 3F 31 | 2E 74 72 61 6A 00 00 00 .....R?1.traj...
00000010: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000020: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000030: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000040: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000050: 00 00 00 00 00 00 00 00 ........
Read data
00000000: 00 01 00 02 00 02 3F 00 ......?.
Write data
00000000: 00 01 00 02 00 09 40 01 | 00 00 00 01 00 00 00 ......@........
Read data
00000000: 00 01 00 02 00 02 40 00 ......@.
Write data
00000000: 00 01 00 02 00 09 40 01 | 00 00 00 01 00 00 00 ......@........
Read data
00000000: 00 01 00 02 00 02 40 00 ......@.
Write data
00000000: 00 01 00 02 00 02 0C 00 ........
Read data
00000000: 00 01 00 02 00 02 0C 00 ........
Write data
00000000: 00 01 00 02 00 01 0D .......
Read data
00000000: 00 01 00 02 00 03 0D 00 | 02 .........
Write data
00000000: 00 01 00 02 00 52 3F 31 | 2E 74 72 61 6A 00 00 00 .....R?1.traj...
00000010: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000020: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000030: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000040: 00 00 00 00 00 00 00 00 | 00 00 00 00 00 00 00 00 ................
00000050: 00 00 00 00 00 00 00 00 ........
Read data
00000000: 00 01 00 02 00 02 3F 00 ......?.
Write data
00000000: 00 01 00 02 00 09 40 01 | 00 00 00 01 00 00 00 ......@........
Read data
00000000: 00 01 00 02 00 02 40 00 ......@.
After first run it really works but then it stops working until the arm is moved via the web interface.
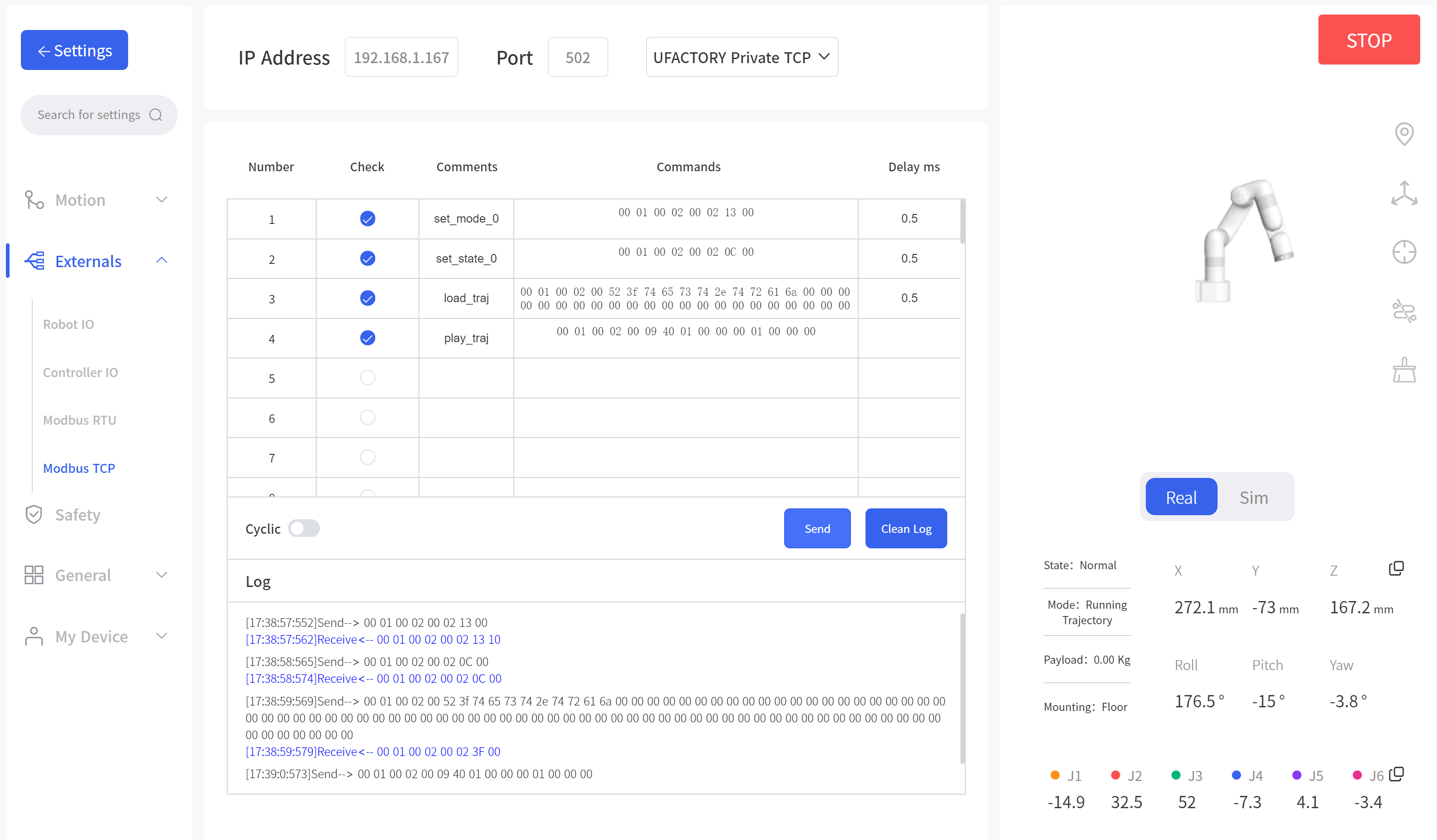
Hi, the previous commands are incorrect.
Here are the correct commands with UFACTORY Private TCP protocol, please give a try.
- set mode 0
00 01 00 02 00 02 13 00
- set state 0
00 01 00 02 00 02 0C 00
- load trajectory “test”
00 01 00 02 00 52 3f 74 65 73 74 2e 74 72 61 6a 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
- play trajectory “test”
00 01 00 02 00 09 40 01 00 00 00 01 00 00 00
BTW, you can try the Modbus tool in UFACTORY Studio if you upgrade the firmware/studio to the latest.