Hi there, I’m new to uArm and Linux and so please forgive me if these questions are rather basic, I’ll try to keep this post as consice as I can!.
I’m using uArm for an engineering project and I’m hoping to use ROS to control the robot. I’ve been following the uArmForROS tutorial and have ran into a couple of problems, regarding the installation of uArmForPython.
First I should explain what has been installed: On a 32GB SD card I have installed an image of Ubuntu 14.04 (which runs on the Raspberry Pi 2) using this tutorial.
I’ve also overclocked the RasPi using these settings:
arm_freq=1000
core_freq=500
sdram_freq=500
over_voltage=2
I’ve then installed ROS Indigo onto the RasPi using this method.
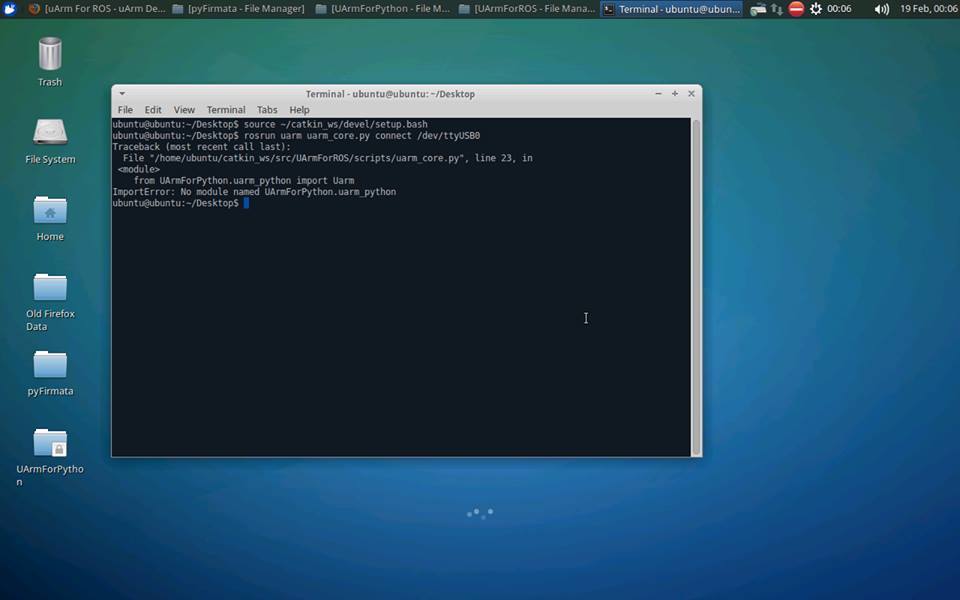
Next is where I in run into problems, when following the ROS developer tutorial and trying to connect uArm to the RasPi I get an error about uArmForPython not being found, I’ll attach a screenshot at the bottom of this post.
I’ve tried installing pyFirmata and uArmForPython several times but can’t seem to do it successfully.
Can anyone point me in the right direction? Has anyone successfully run uArmForROS from a Raspberry Pi? Perhaps someone could provide step by step instructions for installing pyFirmata and uArmForPython, or indicate which directory / repositories they should be installed to?
Any help is greatly appreciated.
Cheers,
C.

{kind=link}