I noticed that there are now TCP calibration functions in the xArm Python SDK.
I couldn’t find much documentation on how to use it.
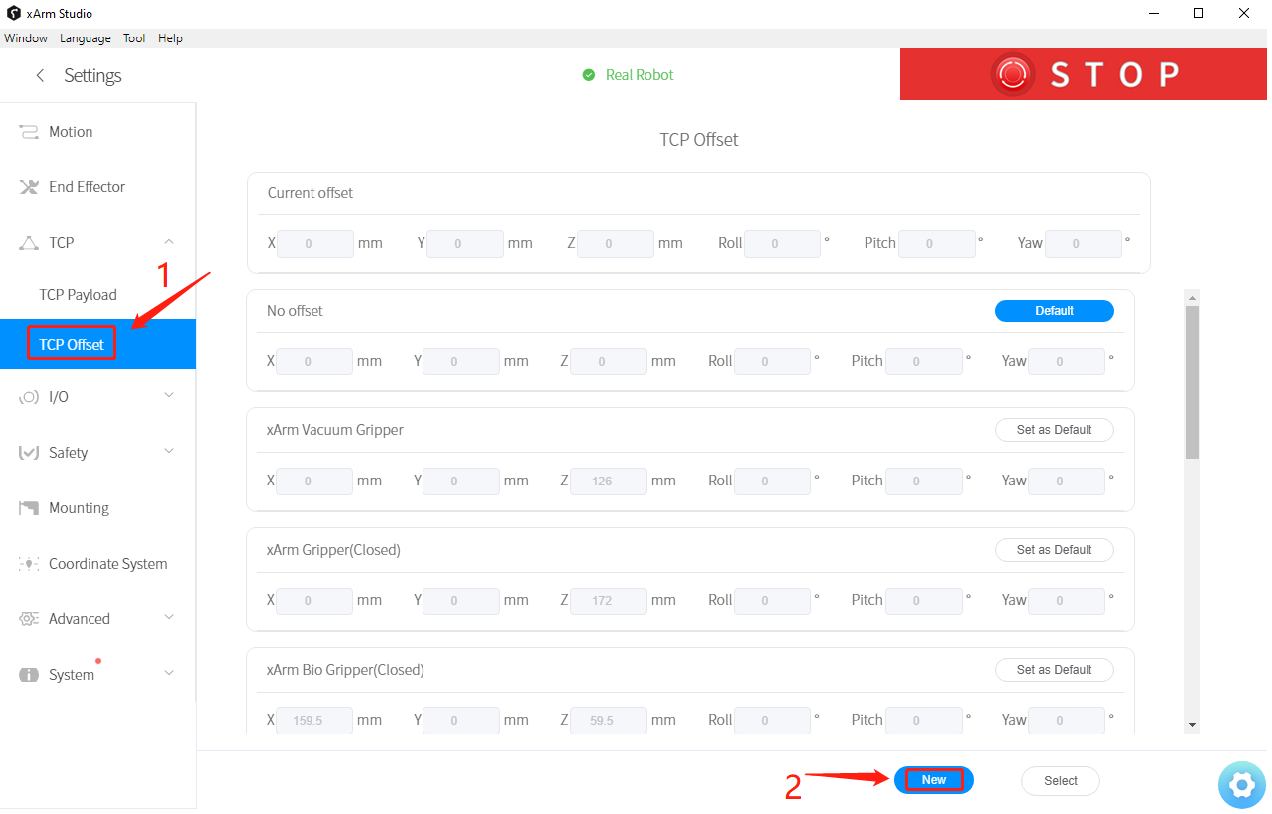
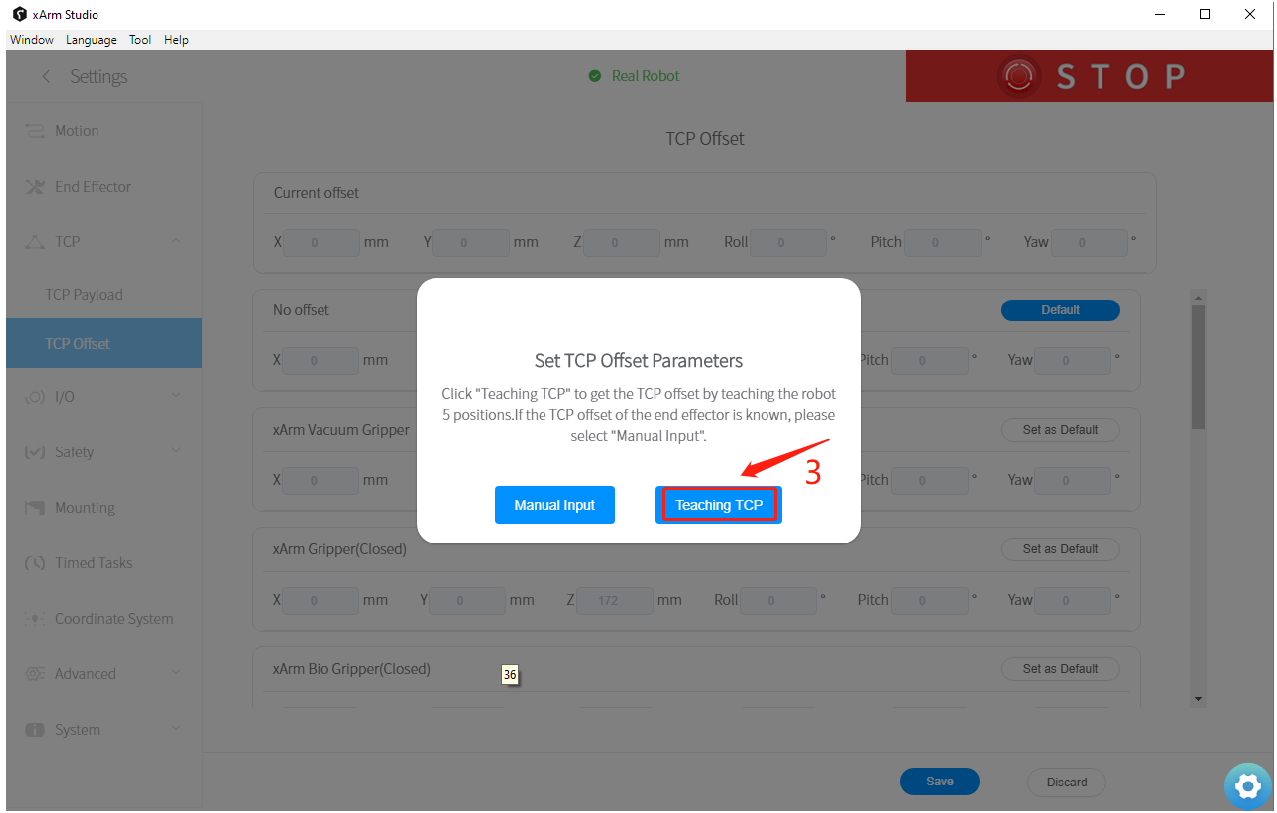
What I would like to do is attach a tool to xArm and then follow some mechanical/SDK procedure so that the tool TCP details can be calculated and configured into the controller.
-
I’m guessing this would involve some sort of calibration jig and some manual alignment by the operator? Maybe something like tell operator to move the tool point to a jig reference point in several different ways and then xArm software solves for the TCP’s offset and orientation? Do you have any documentation somewhere explaining this procedure more fully?
-
Also, what is the relationship between offset and orientation calibration? From the code, it looks like that if you want just XYZ, you do calibrate_tcp_coordinate_offset() only but if you want XYZRPY then you FIRST do calibrate_tcp_coordinate_offset() followed by calibrate_tcp_orientation_offset() ? Looks like you give 4 points to the first and an additional point to the second? Then you pass the results to set_tcp_offset() or something? Any doc or (even better) code examples for this?
Thanks,
Andre