Hey all. My new uArm Swift Pro seems to have no idea where it is. It functions relatively to wherever it is when it powers on. This means that not only are my actions not repeatable, it’s unable to travel on a level plane as the two arm servos are not at the angle it’s expecting. I’m looking for a calibration routine or even an exact position I can boot it up on to make the arm coordinate.
Ideally it would be a firmware update that sorts itself out on bootup.
Urgent in that the unit is useless to me without any calibration.
Managed to 3D print something last night! Needed some creative post-print-start “manual calibration” but the actual result isn’t terrible. Still, not something I’d call reliable or fit for purpose
I am having issues as well. It looks like it is trying to go beyond its limits… It will recreate the saved program, just not from a repeatable starting point… HELP
I can get it to print with difficulty. It is very challenging to find the place the printer thinks it is, and this has to be readjusted when starting EACH print; it doesn’t even try to start in the same place, even when the power remains on. It isn’t just important to get the print head on the bed, but to get it to travel level and also for it to correctly control the x axis with it’s two arm servos; if it is incorrect, I end up with inequal X:Y such that circles are not circular.
Still waiting on some input from the manufacturer…?
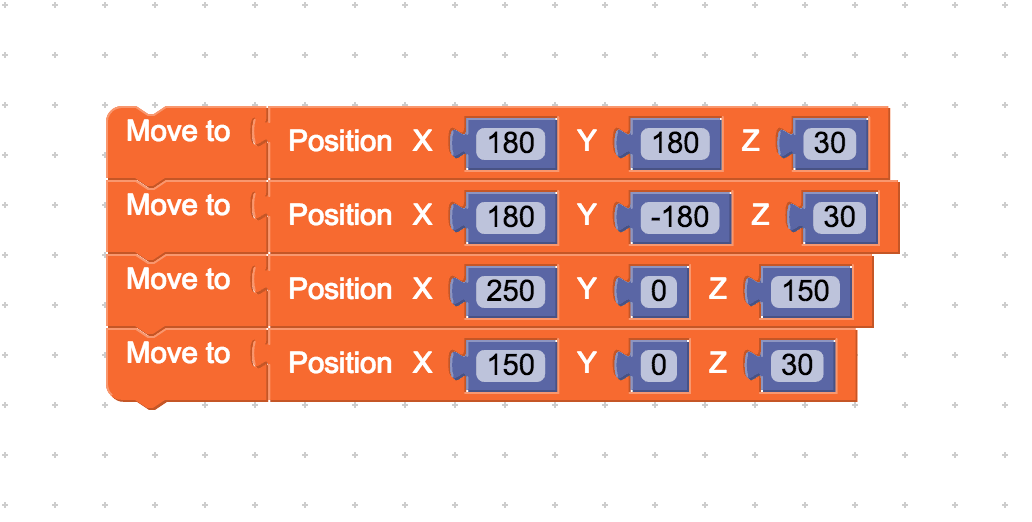
@smence, Please send the command “G0 X200 Y0 Z100 F5000” to the arm without plugging the 4th axis, so that we could make sure if the main body of uarm is good. If the arm is not working well, please power off(the orange button) the arm to reset the system, then try again. Because sometimes, when arm moves to the limiting position, the steppers will lose the steps and it makes the angle completely incorrect. The best way to solve it is reset the system by power button. Then try the command above again.
Updated firmware, removed suction. It moves more smoothly but it looks a lot like the steppers are not wired properly. Drawing a square in the drawing program results in lots of movement in the Z axis.
A Blockly “RESET” command is not possible out-of-the-box, as it tries to reach an impossible position. Are you going to fix that soon?
Does the uArm Pro have absolute encoders? If so, why it does not sense when the stepper motors are loosing steps? Will this be improved in a future firmware release?
Besides of that, I am very pleased with build quality and packaging.
Hi MarcoWue,
1, Our engineer are working on it, it’s a bug of the blockly. Sorry for that.
2, Pro has the 12bit magnetic absolutely encoders in each joint, while now it works only after power on to detect the original position of each joint, it won’t work during the movement. And as you said we are working on it to make the encoder much more helpful during the movement.
Thanks for your suggestion, and feel free to ask any question!
Tony
Basically, if the robot lose the step, the best way to make it back to work is power off the robot by power button and then power on it again. Since reset will make the encoder work once and get the correct joint data.
@all
If anyone get some weird issues, would you please try to build a blockly demo and take video for us so that it would be helpful for us to find the problem.
I’ve been working in this space for a while (ported a gcode interpreter to Arduino with serial drip feed for a home made CNC, am on my 3rd CNC router, and have a python software stack for generating and manipulating gcode). I have high hopes for the uArm, but am increasingly frustrated.
Hi Sean, really sorry for the trouble you are getting! One more thing we want to confirm, did you rest the arm before the blockly demo? If so we would send you a replacement since we are sure the arm got some hardware issue. Very sorry for the inconvenient!
I did both power-off resets, as well as adding a reset to the beginning of the blockly code. I also tried changing the location of the arm at power up. I could detect no pattern in the resulting failures – they just seemed inconsistent. The video I posted above was picked because you could hear the limit of motion failure in what should have been a safe program.
Thanks for your offer for the replacement, and I will be very excited to get it. You may still be the first 3d printing capable machine I’ve gotten from kickstarter, after participating in two others that have failed to deliver anything!