anykey
June 5, 2017, 12:38pm
1
Hi,
Can someone explain to me how the calibration of a uArm pro works?
I see there is the command M2401 to set the current position into the reference position. What what should this reference position be. What are the reference angles for each axis?
Regards,
1 Like
Cleo
August 9, 2017, 10:40am
2
Hi @anykey
You can get the guide for manual calibration here:
1. What should I do if uArm Studio failed to connect with uArm Swift (Pro)?
Please check this post:
2. What is “firmware”? How to update firmware?
Firmware is the “brain” of uArm, which enables uArm to understand your requests when you try to control it via software or codes.
In order to fix bugs or add new features, we’ll update firmware from time to time. We suggest all users to keep the firmware updated.
Please enter “Setting” or "Check for Updates’ to see the latest firmware versio…
When I send the M2401 B uarm returns E25 please can you tell me what this means?
Cleo
September 7, 2017, 6:20am
4
Hi @Matthew_Burston
E25 means failed operation. It may be caused by two reasons:
Power supply is not connected properly.
The wires are not connected properly.
Please check the connections. Let me know of further problems. Thanks.
I was trying to calibrate the uArm since I have been seeing issues when trying to 3D print. It doesn’t stay on the same plane the entire time.
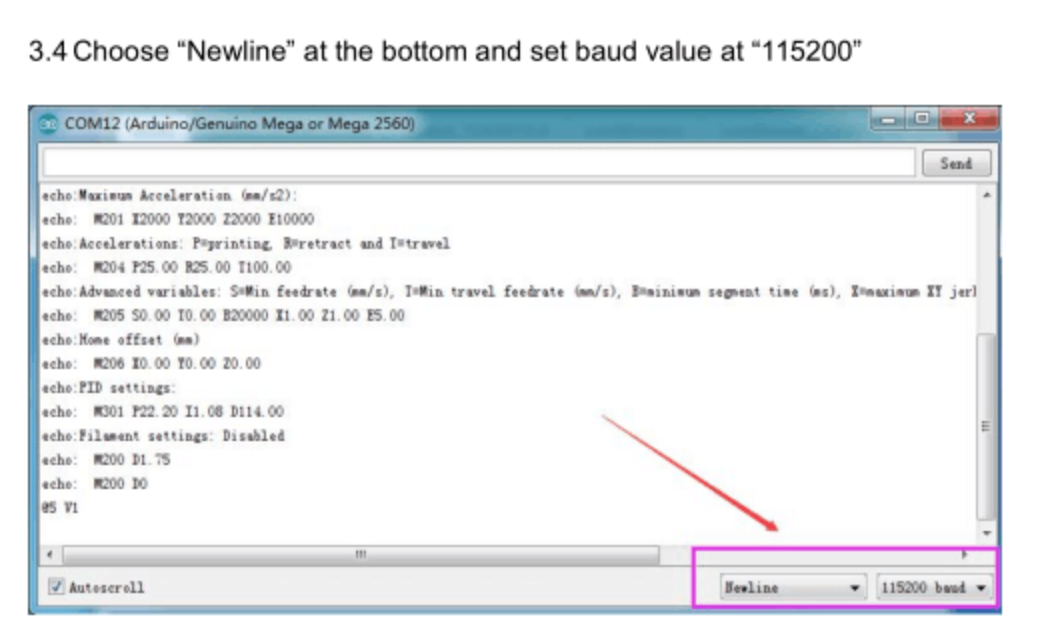
When I follow the pdf instructions at: https://drive.google.com/drive/folders/0B-L-tCvknXU9ZXBweVlYRXd5VHM
I was using Arduino and the COM and sending the M2019 command it does not disable the motors. Any help would be appreciated.
Cleo
September 11, 2017, 1:59am
6
Hi @jrtaylor0319
Did you receive an “OK” after sending M2019?