1. What should I do if uArm Studio failed to connect with uArm Swift (Pro)?
Please check this post:
2. What is “firmware”? How to update firmware?
-
Firmware is the “brain” of uArm, which enables uArm to understand your requests when you try to control it via software or codes.
In order to fix bugs or add new features, we’ll update firmware from time to time. We suggest all users to keep the firmware updated. -
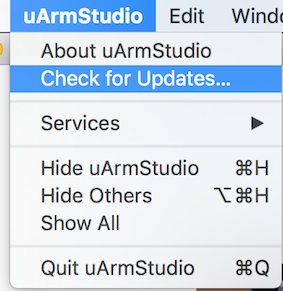
Please enter “Setting” or "Check for Updates’ to see the latest firmware version, release notes, and update firmware.
3. What should I do if firmware flashing is failed halfway, or I flashed the wrong firmware?
Here are the steps to flash firmware manually:
-
Download “FlashTool” (Flashtool is a simple tool made by the uArm Team for flashing firmware manually) and Firmware .hex file (currently for Pro only)
-
Connect uArm Swift (Pro) with computer via USB.
Please don’t use uArm Studio while using FlashTool, or the port will be occupied. -
Open FlashTool, and then drag the .hex file into the FlashTool window. Done!
Now you can open uArm Studio to check if the firmware is the latest.
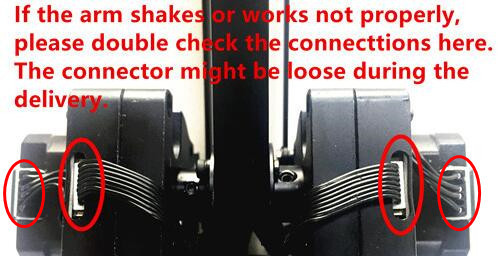
4. What should I do if uArm seems to have a calibration problem/moves abnormally/skips steps?
1)Please check the wire connection (which may loose during shipping).
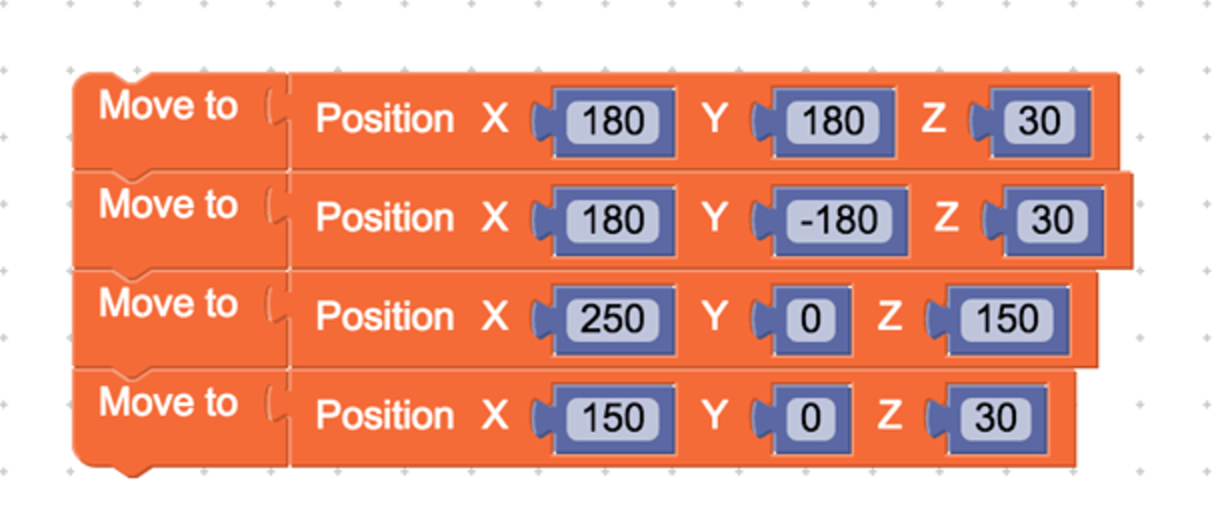
2)Let uArm go to these points via Blockly and send us a video.
So we can judge if there’s a hardware problem.
3)Re-calibrate manually (only available for Pro).
But we don’t recommend frequent calibrations.
Guide for re-calibration
5. How to use Bluetooth Module? How should I deal with Bluetooth problems?
Plug in Bluetooth module to your PC, let uArm stay close to PC, and then you can control uArm via uArm Studio wirelessly.
If Mac failed to discover uArm via Bluetooth:
1). Donwload FTDI driver here: http://www.ftdichip.com/Drivers/VCP.htm3
(some Mac systems don’t have built-in drivers)
2). Restart PC and try again.
If PC(Win/Mac/Linux) can discover but failed to pair with uArm:
It’s caused by an error of pairing prior to shipping.
Please download Bluetooth Pairing Tool, and pair them manually.
Before using it, please ensure neither the uArm nor the bluetooth module is connected by other bluetooth-enabled device.
6. How to get the current coordinates of the uArm
We recommend 2 ways to get the current coordinates of the uArm.
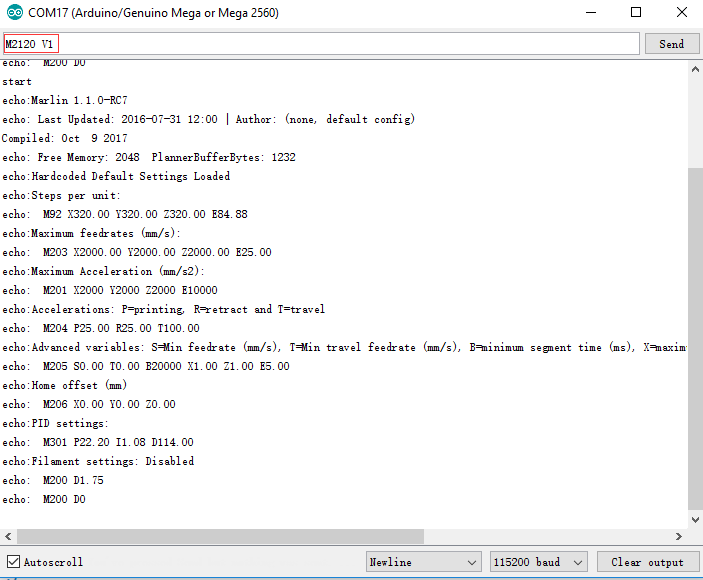
(1)By Aruidno
Send “M2120 V1” to uArm and it will feedback current coordinates per second.
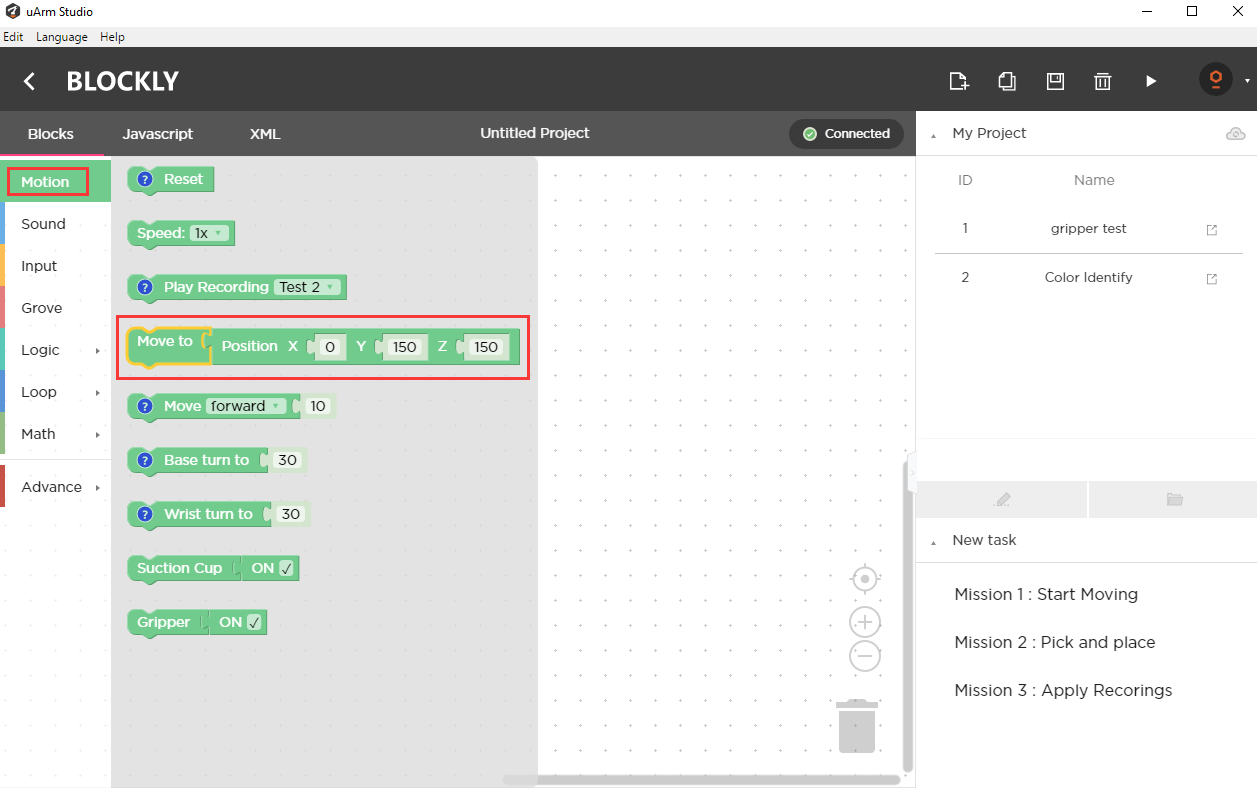
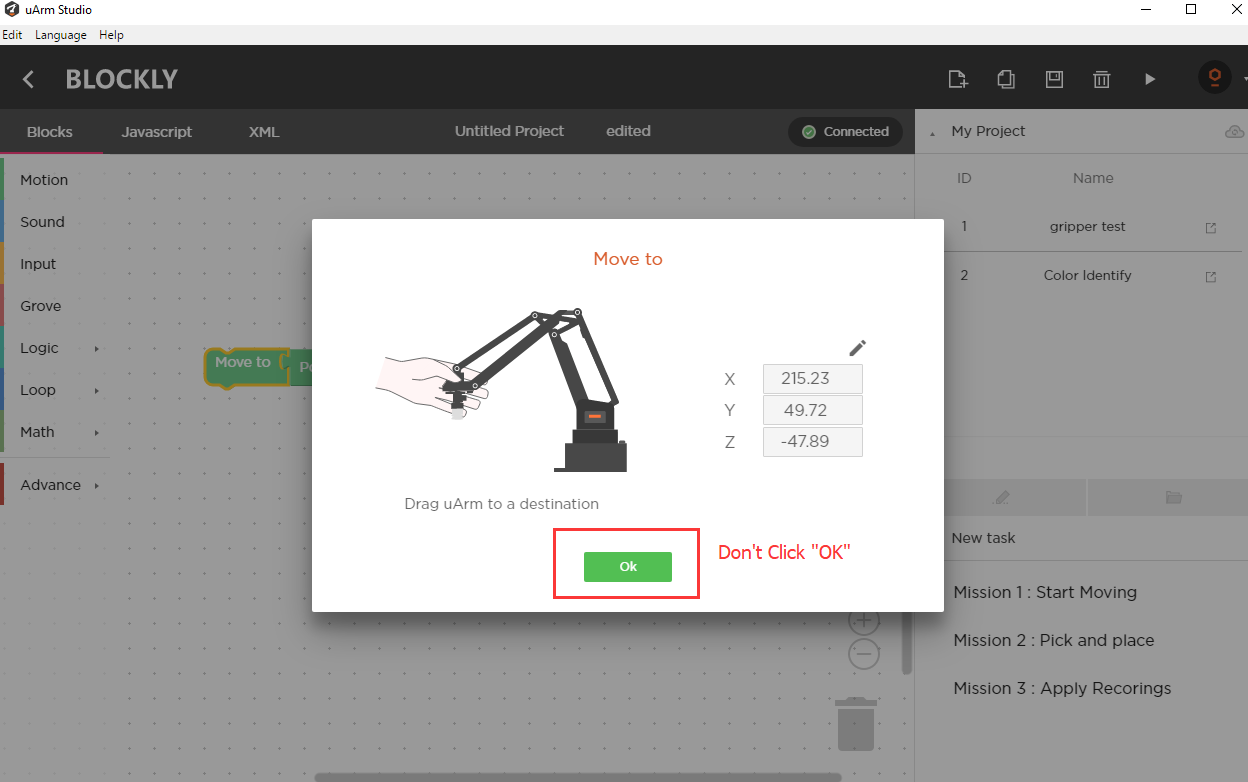
(2)By uArm Studio.
Run uArm Studio and open the blockly function, drag “Move to” module to the panel and DO NOT click the “OK” button. It will show current coordniate.
10.How to upload firmware to uArm Swift(Pro) by Arduino IDE
7. What should I do if uArm Studio shows disconnected
Please check this post:
8. How to get the log files of uArm Studio
Please check this post:
9. How to adjust focus of uArm Laser?
Please rotate this part while the light is on until you get a very tiny dot on the paper. Please ware the protection glass while doing the adjustment.
10. How to order extra kit?
For those who want to order extra kits, please visit our online store: http://store.ufactory.cc
11. Why my Android device failed to connect to uArm by uArm Play APP?
You may have to turn on the Bluetooth and Location Service for the Android system,and also need give uarm play the access to the Bluetooth and Location service.
UFACTORY Website:
www.ufactory.cc
uArm User Facebook Group
Contact Us:
English Channel
中文